



Hi Marco,
Unfortunately, the 2nd log is empty.
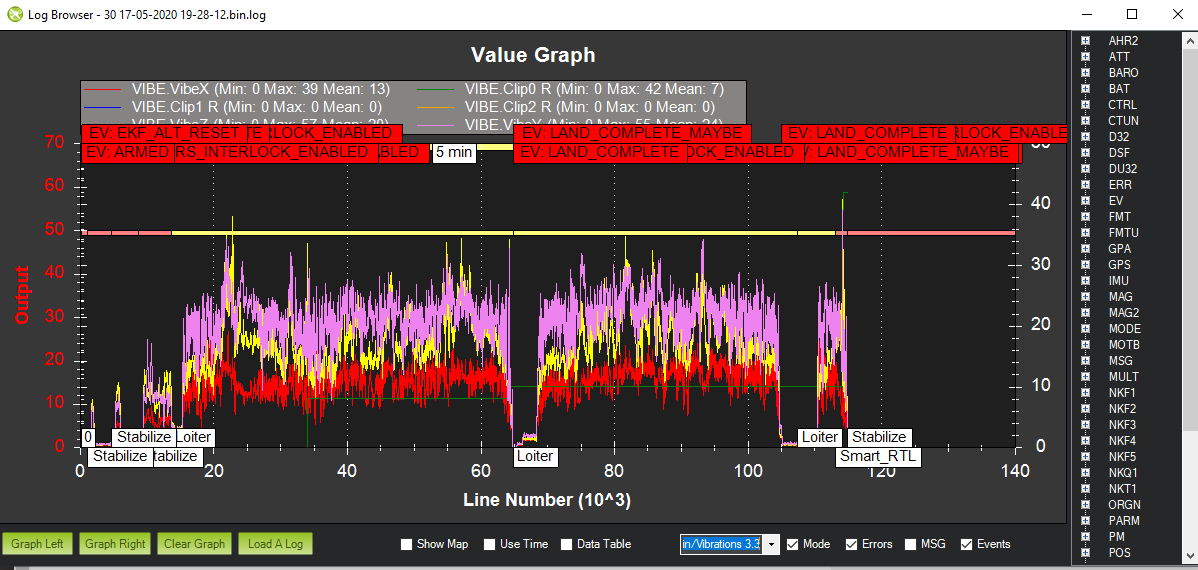
I’ve looked into the log from the 1st flight, and it seems that the flight controller experienced quite high vibrations:
Do you use any anti-vibration mount on your drone? May I ask you to share hardware setup photos?