



Hello friends I am trying to use the guided mode but it gives me the following error message “preArm: need 3D fix” I am using the integrated gps module in Navio2. Can someone help me?
To use modes like loiter, auto, guided or RTL, the vehicle needs to know where it is. It uses GPS to get the positioning data and when there is no GPS fix (a known position from the GPS), the vehicle can not use the modes mentioned above. The prearm check will prevent arming the vehicle without a GPS fix, so you do not switch to one of the GPS modes in flight and get an unespected behaviour. So you just should have to wait for a while, until your vehicle has a solid GPS fix. And GPS works best outdoors, clear view to the sky down to the horizon, no powerlines overhead.
Hi Alvin,
Did it work for you?
it does not work I will try to format everything again
Hi Alvin,
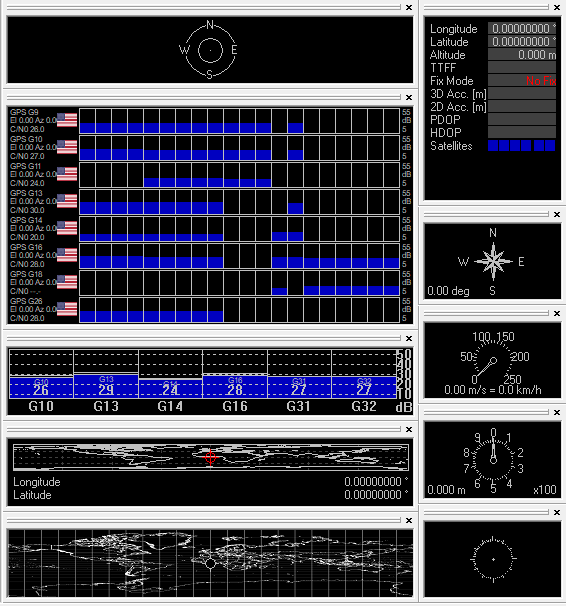
To have a 3D fix you need at least 4 satellites. What was the number of tracked satellites for your drone GNSS receiver when you tested?
0 satellites, should I change some parameters?
Alvin,
What’s your hardware setup? Did you connect the antenna to Navio2? Did you test outdoors?
Yes I test outdoor, I use raspberry pi 3 and I use Qgraundcontrol. I preArm with Qgraundcontrol and I conect antenna
Alvin,
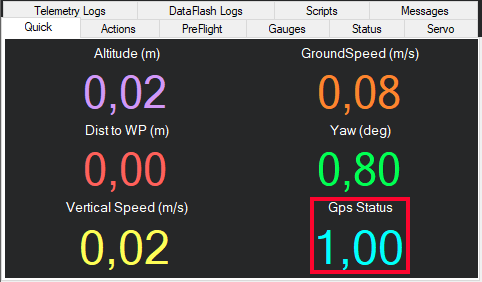
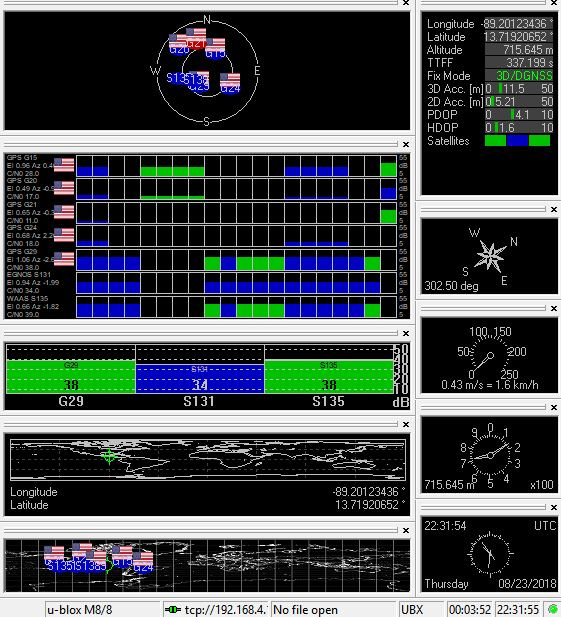
What’s the GPS status in Mission Planner while GPS is connected? I’ve attached the image below and marked it.
 I have this it
I have this it
Alvin,
Do you have another antenna to test with it?
yes I have another antenna, I thought about that before but it still gives the same result
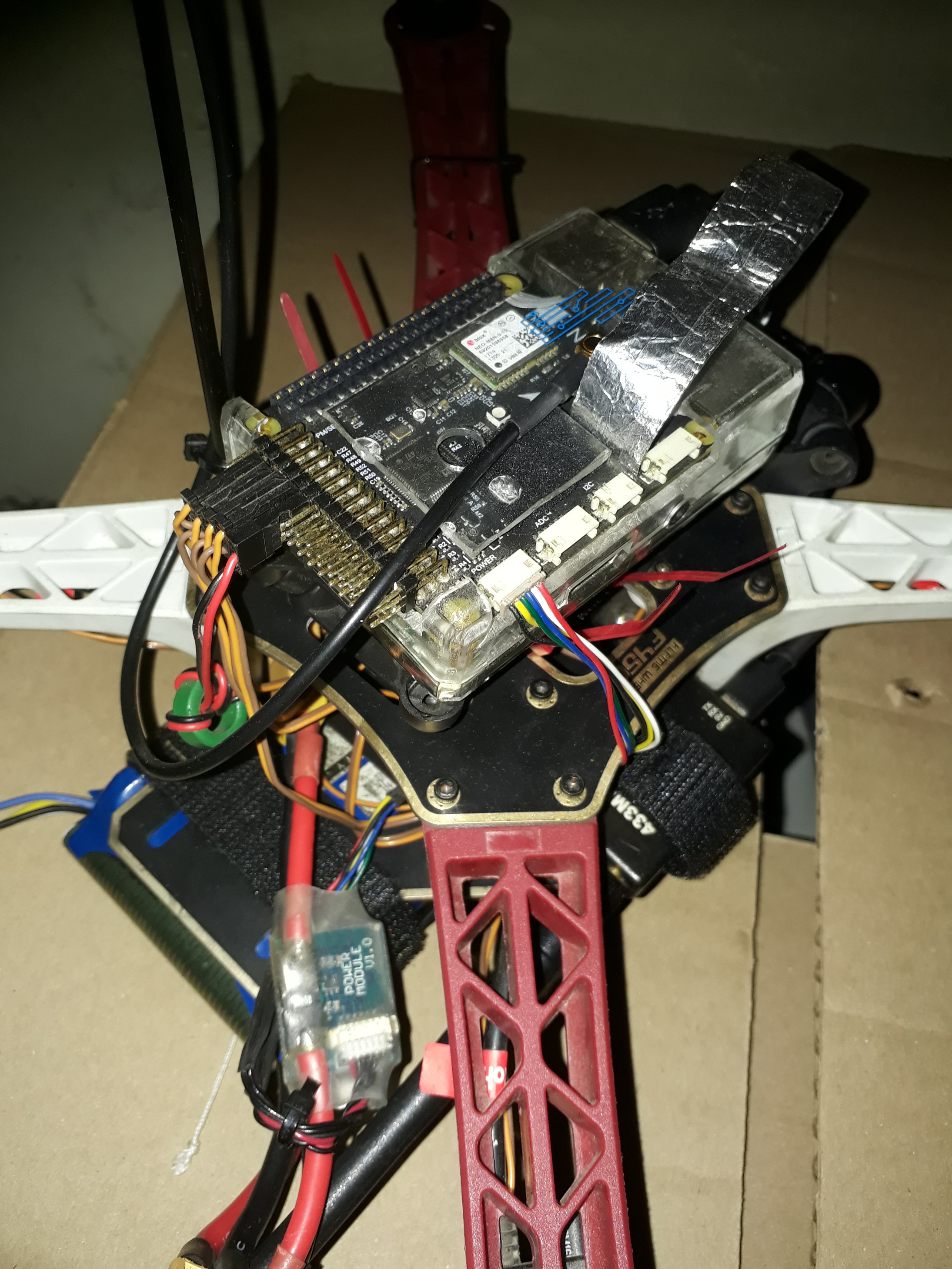
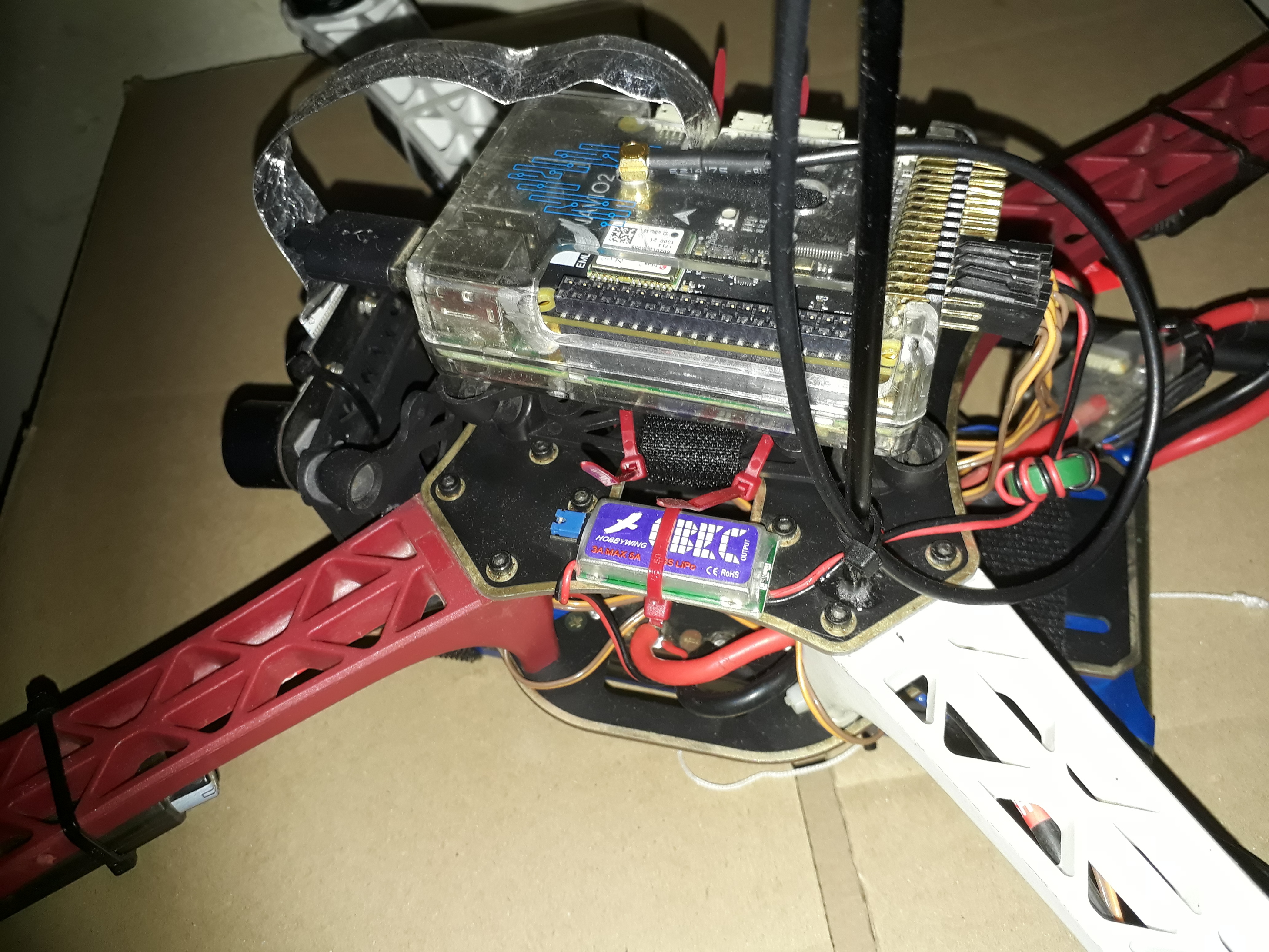
Could you please share a photo of Navio2 hardware setup?
What may be happening?
take the plates the gps antenna battery and take them to an open place the sky was partially cloudy and with a utility I measured the intensity of the gps signal and obtained positive results
Yes kit telemetry cause interference and I do iliminate and i work with connection UDP
1 Like