



I have some problems getting my MissionPlanner to connect to my RaspberryPi based quadcopter. I can’t seem to get it to connect using my telemetry radio, or through usb cable. I am new to this and I am not sure what could be wrong.
Image and ArduPilot version: Buster - ArduCopter3.6
When I try to connect mission planner to my quadcopter it can't make a connection. As far as I am aware it should be able to detect that it is plugged in via usb and connect through that. I also have a telemetry radio pair that won't sync up (lights never turn solid green) and so it won't connect over that either.
Step by step actions:
When following along with the documentation for MissionPlanner I have installed it and all of the drivers it automatically pulls up in installation.
Then when I open mission planner up and try to select the connection method it pulls up no com ports
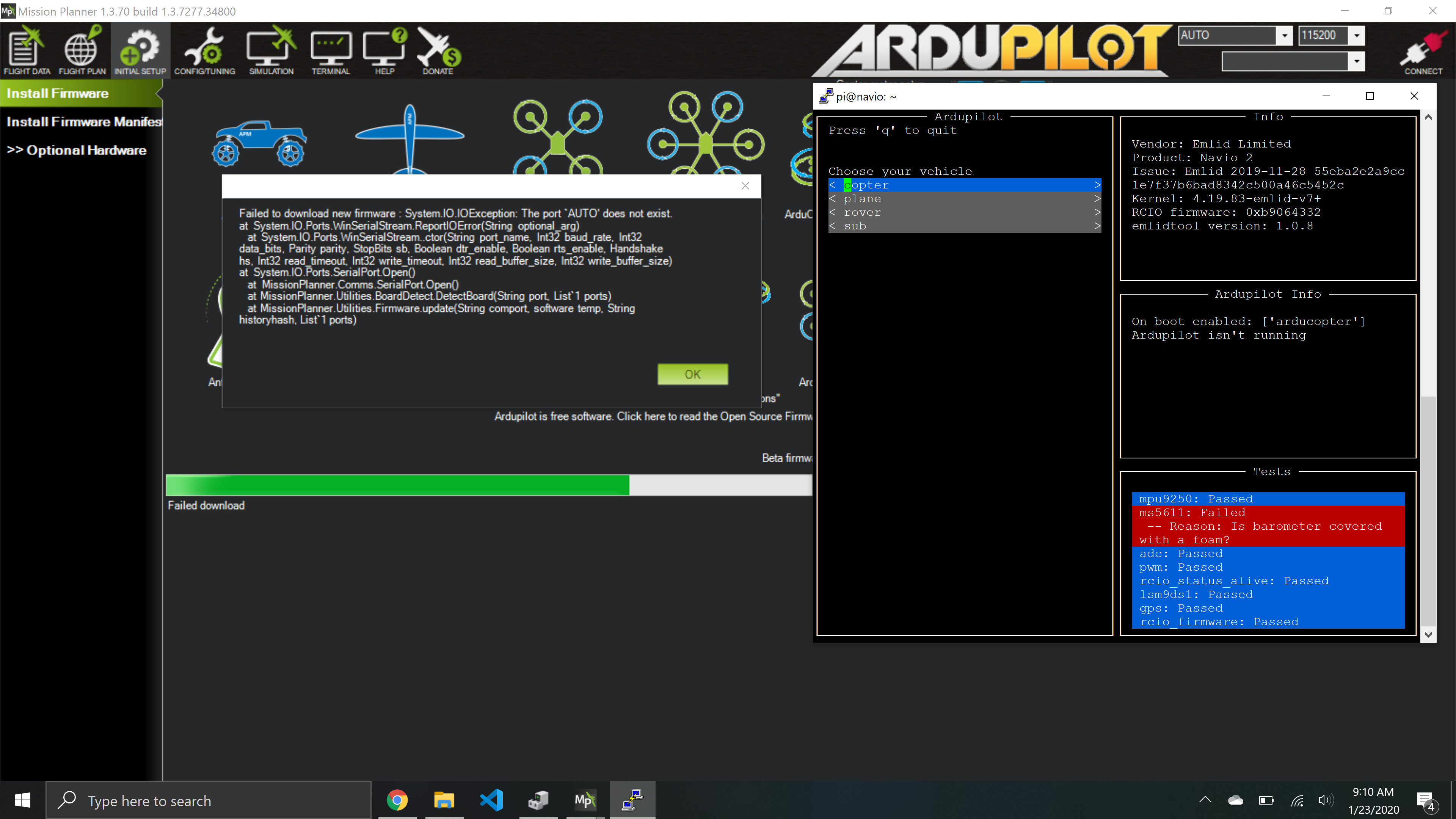
When auto is selected and then I go to initial setup → install firmware → arducopter 4.0.0 and answer the pop-ups it simply errors out saying port auto does not exist.
If using any additional hardware please provide exact make and model:
telemetry radio: https://www.amazon.com/gp/product/B01DHV4DVA/ref=ppx_yo_dt_b_asin_title_o02_s02?ie=UTF8&psc=1