We discovered the following when flying with the Emlid M+ today:
Flight time: 28min
Images captured: 194
PPK Triggers: 187
Missing triggers: 7
While post-processing with the EZsurv software, it constantly generates a warning that images captured don’t match the number of triggers.
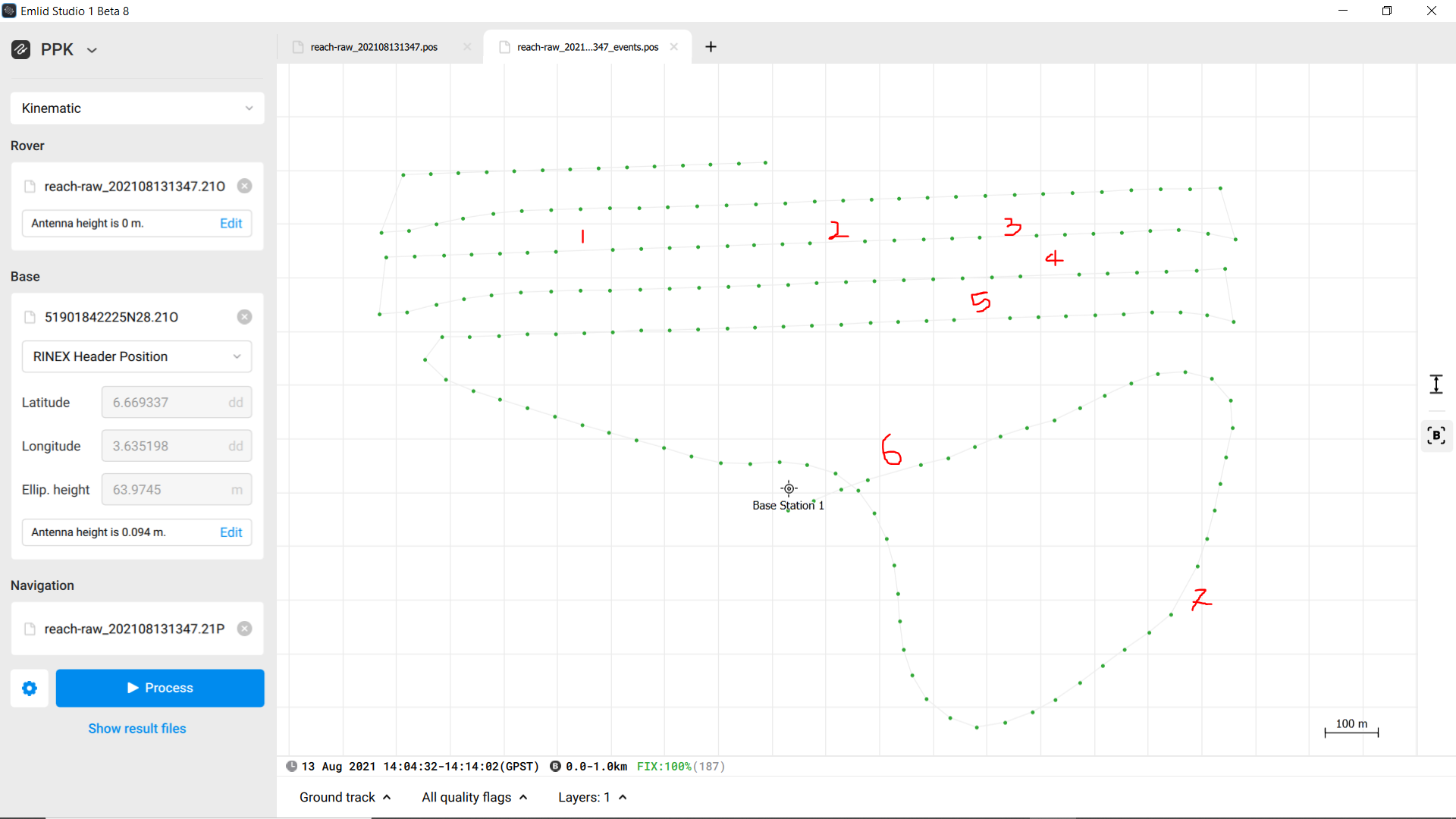
This was validated by Emlid Studio, as the screenshot below shows gaps or missing triggers from the ubx file.
Additionally, it confirms the seven (7) missing PPK triggers required to post-process the images acquired by the camera.
Can you share your data set and details of your setup? I’ll check it out.
If you have any sensitive info there, you can send a link to the dataset to support@emlid.com
Yes, raw data logs from base and rover, and photos.
By the setup, I mean the installation of the receiver and GNSS antenna on your drone and the connection of the Reach M+ to the camera. Some photos can be helpful.
I’ve checked your data and have some results to share.
I noticed that raw data contains lots of cycle slips. Cycle slips appear when the GNSS signal is interrupted by other radio-electronic sources.
The first thing I recommend is to isolate the receiver itself and the cables that lead to the GNSS antenna and the camera.
I see from the raw data log that you have enabled GPS, GLONASS, Galileo, and BeiDou at 5 Hz. For Reach M+, we have strict recommendations for aerial mapping. I suggest set GPS + GLONASS or GPS + GALILEO at 5 Hz in GNSS settings.
These recommendations should help to acquire all time marks.
Can you also check what the current firmware version installed on the unit is?
What is your recommendation for fixing missing events? Obviously, one would still like to use the images in reconstruction.
I envision something like a grid where images with rough GPS coordinates can be overlayed with the trigger event positions? That way it would be very clear what images were missed?
Or if no approximate location, then put both sequences on a timescale that can be interaligned?
I’m no photogrammetrist … could you not interpolate the image position based or speed/time interval between aligned images ? I’ve been refreshing my knowledge on aerial photography from some of my old college courses/books (1976) and it’s amazing what was done with equipment and methodologies used back in the 60’s and 70’s.
I went and visited Sanborn’s office in Charlotte NC about 20 years ago when we had a site flown for 1 ft topography. We had provided all the ground control for the site (about 25 points) and it was amazing seeing the equipment used to generate the contours. Part of the specifications for the project was ground truthing as the civil engineers didn’t believe in the accuracy of the contours generated by aerial topography, We basically also did a ground topography doing this. It cost the engineers as much as if we had done a full terrestrial topography. Everything checked within their tolerances. It was a good project to convince the engineers on the accuracy of photogrammetry.
We’ve done several projects since then using Sanborn’s services for the engineering firm. Sanborn’s processes/methodologies we’re fascinating to me.
There are two different ways the flight softwares calculate the image positions. One is a standard 2-second interval. The 2nd is predetermined GPS locations. The problem with using GPS locations when not using RTK is that you are AT BEST going to be within a meter of that waypoint. The points stay pretty well in line because everything is calculated off the major waypoints (turns) but along the line can suffer any time the GPS is not optimal. You will see gaps and double-taps without RTK guidance. People sometimes misunderstand what the RTK is doing for the process and the only thing it has to do with the images is the fact that it is able to maintain those waypoints with cm-level accuracy which not only writes a better tag to the image but it makes the uniformity of the image location near perfect and your overlaps are totally consistent. I would go as far to say that with RTK you could run slightly lower overlaps and still get better accuracy.
This is no doubt! There is another new thread about mine/quarry mapping and the quarry I shared the pictures of has been using photogrammetry mapping since 1969. They have 20ft x 20ft rubber X’s on the ground that were professionally surveyed in and remain to this day. Can you imagine the camera technology back then or how expensive the best was? Then add the cost of an airplane and pilot?
I made the mistake of getting hired to map it for a couple of months in a row but explained it too well and ended up unknowingly being a consultant. Now they have their own UAV program.
That’s when you wish had charged them way more :S I have been in the same situation… One of reasons that I claim that positions etc is my IP and that GCP’s has to be removed and returned to me, if they are no longer using me a provider.
They never saw my file so I’m sure they paid a pretty penny to have them resurveyed or to set new points. I charged them a fair rate but it was twice what I normally charge for the sheer drive time from position to position. You don’t realize how big these places are until you are out there in your little truck, lol. It was about a 15 mile journey every time, at 10 mph…
One thing I was thinking as I went through the topic is that I don’t see a mention of the actual hardware setup. To me it could easily be a flight software or camera problem and probably not the M+ itself. This can be caused if the software doesn’t initiate or if you are using something like a light sensor that doesn’t send a good signal…
Yep, I try and keep my mouth shut on “secrets” of software and methodology we use. I’ve been in the same position as you once… when we have consultations with clients for large projects, my brother puts duct tape on my mouth ! I just stand there and listen.