





https://photos.app.goo.gl/ghQ46VYvyFLwC48t7
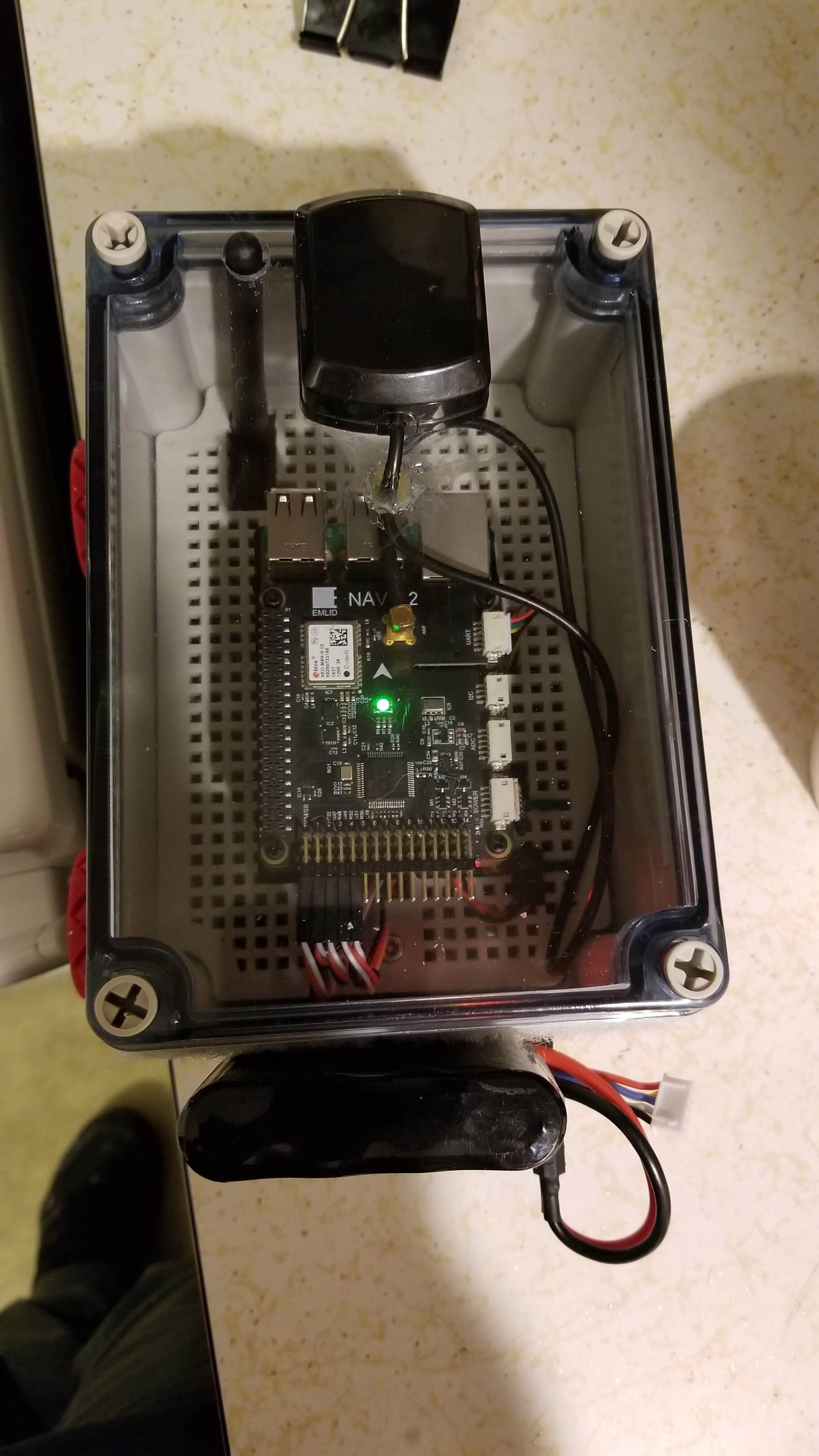
Now that school is in winter break, I have found some time to tinker with some things that had been sitting half complete. This little mecanum rover was one of them. I had a spare navio2 laying around for ages and wanted to put it to use so I decided to build this rover out of it.
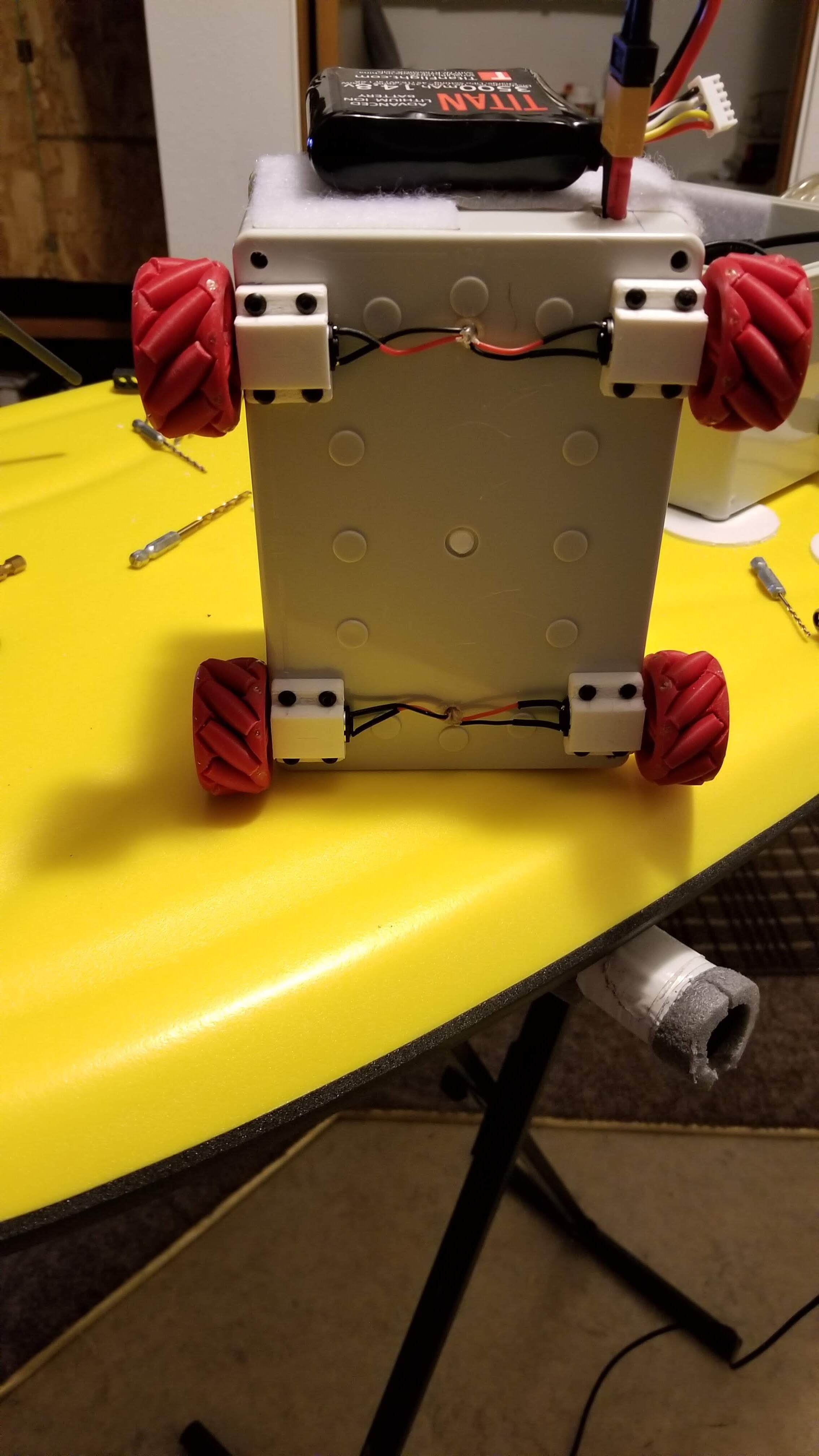
I am using this box from amazon as the body. The motors are from bangoood, as are the brushed ESC
I printed 4 of these in ABS to mount the motors to the junction box, they mount flush and have indentations inside to hold the motors in place.
The esc’s, 6v bec, and battery monitor are all mounted below the flight controller on the grated cover that comes with the junction box, using zipties and double sticky tape. I have also mounted a frsky L9R in there as well. I wanted to play with these mecanum wheels so I decided to build a mini rover to be able to test inside. The wheels were printed from here. They are put together using sewing push-pins easy to print and fun to play with. I just need to figure out how to mount the wheels better to the motor shafts, right now they were just super glued and as you see in the video they don’t stay on very well. I have it running rover 4.0, setup as omni-X, still have to make sure all the motors are working properly and that omni-x is the correct frame.
