



Hi,
I’m trying to build a simple ROS node to format and forward telemetry out as Open Sound Control. I’m having issues with MAVROS only occasionally publishing topics. I have followed the ROS guide and it worked initially but now only works intermittently.
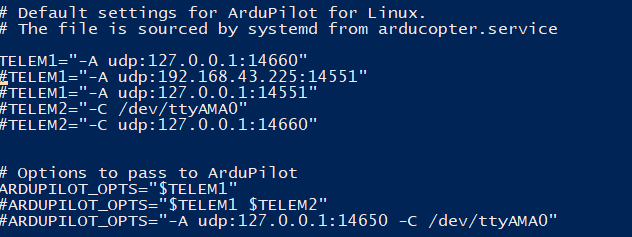
My /etc/default/arducopter looks like this:
I have a start script to start roscore, mavros, set the streamrate and load my ros node:
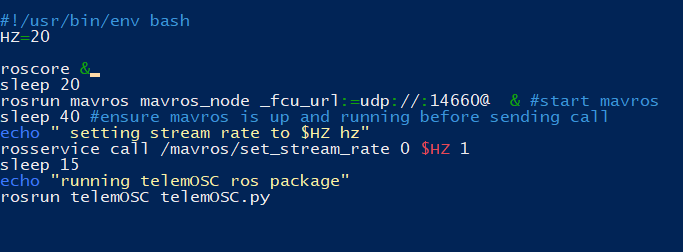
The telemOSC ros node simply logs attitude from /mavros/imu/data.
Sometimes it works… usually it doesn’t. if it doesn’t work it will either output at 1 or 2hz or not at all. I notice when it does work there is a slightly different output from roscore or mavros - specifically:
[ WARN] [1573527449.022465977]: GP: No GPS fix
[ INFO] [1573527449.023153147]: RC_CHANNELS message detected!
[ WARN] [1573527449.031982391]: TM: Wrong FCU time.
If I see that, the topic is then reliably published.
Would very much appreciated any input in what might be going on.
thanks.