I’m trying to understand the difference between Maverick for companion computers like RPI and the recommended Emlid Raspbian image. Could someone please outline the difference between the two and how/when to use them? Am interested to know how Maverick or the Rasbian image receive input from the Navio2 sensors.
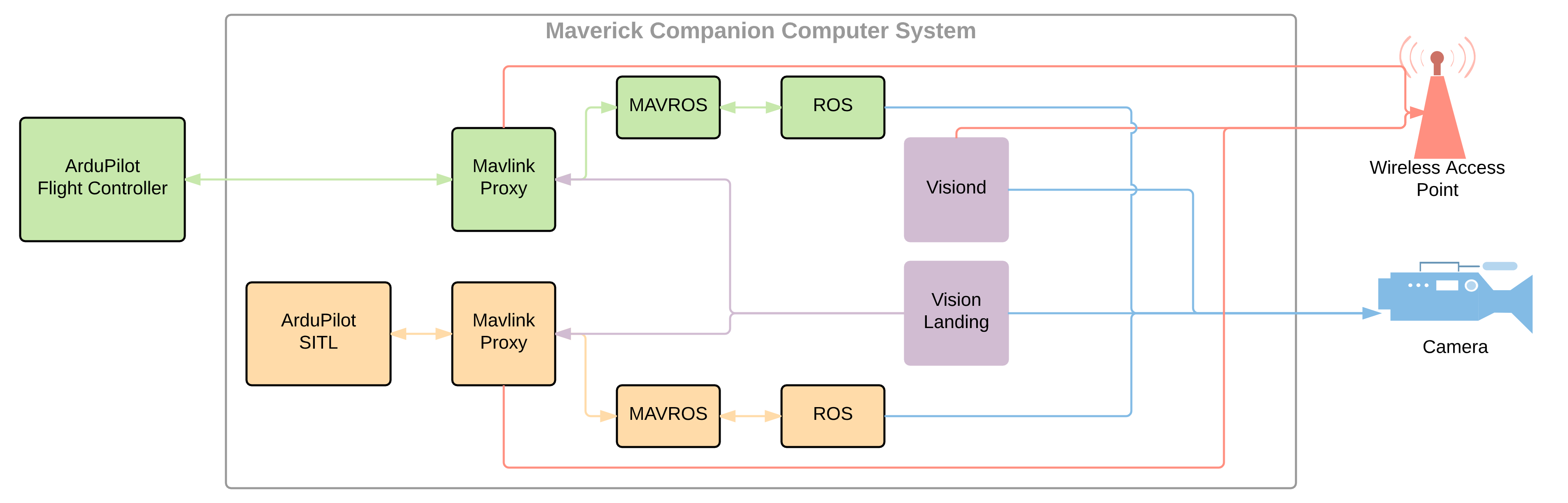
Maverick is a companion computer software collection, it has no means to talk to a Navio directly. The Emlid raspbian image is made to support the Navio2 imu shield, so Ardupilot running on the RPi can access the Navios sensors. You can connect a RPi running Maverick to a RPi running Ardupilot per serial or network connection.