My understanding is that the emlid can broadcast a real time correction, without using NTRIP or caster, by transmitting with its LoRa radio. Please correct me if my assumption is wrong. Our evo wouldn’t take off due to a lack of RTK connection. We’re trying to find out more info on the evo RTK settings. I’d like to know all of the settings to get the emlid / reach3 to broadcast a correct via LoRa. The clip in this vid is 1:56 - 3:23 Reach RS/RS+ — RTK over LoRa radio - YouTube
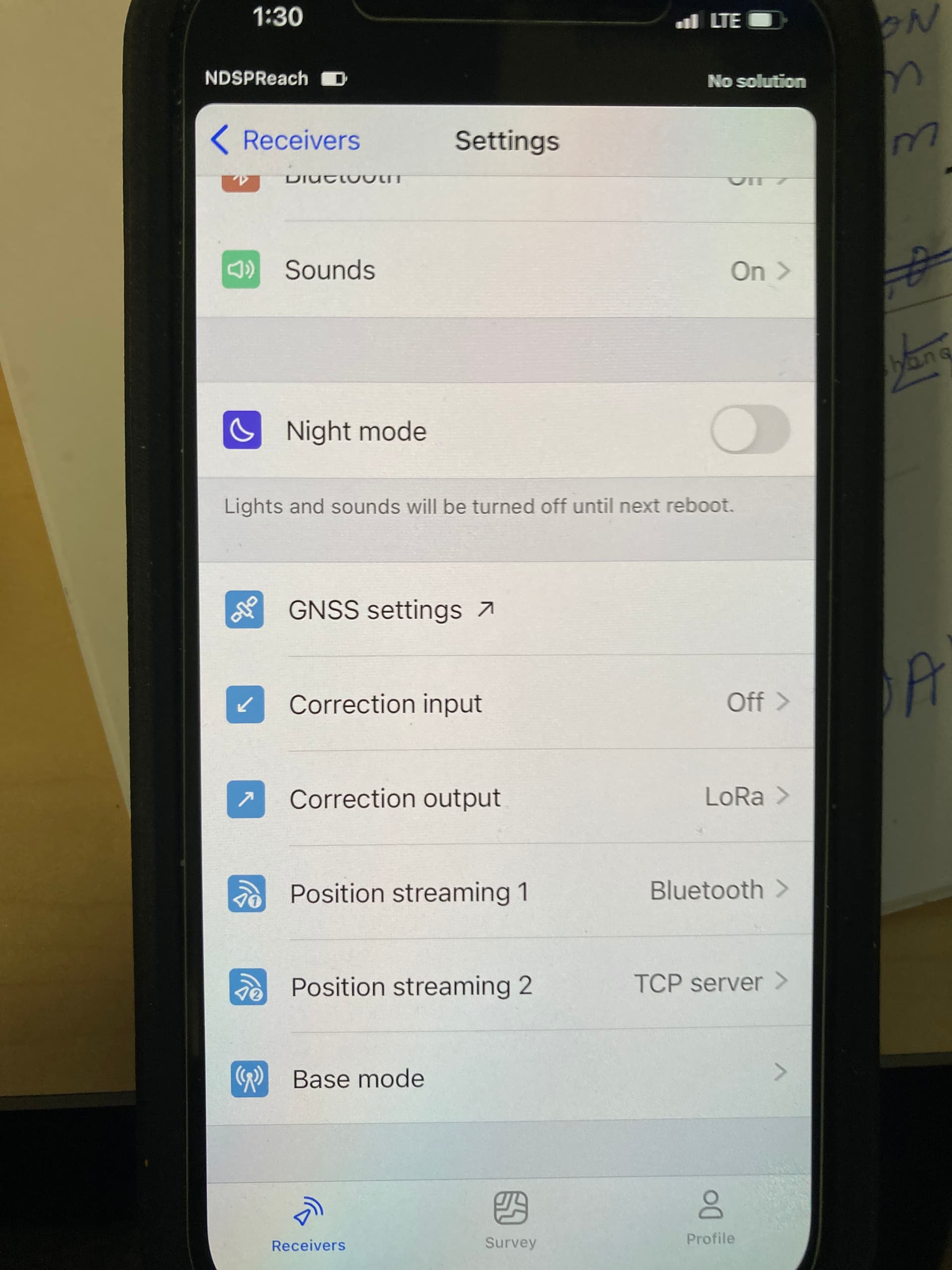
Base mode = manual w/ the coords & ellip height entered for my base point, Rubber aerial ant mounted on the emlid The correction output = LoRa. Are the streaming properties set up correctly?
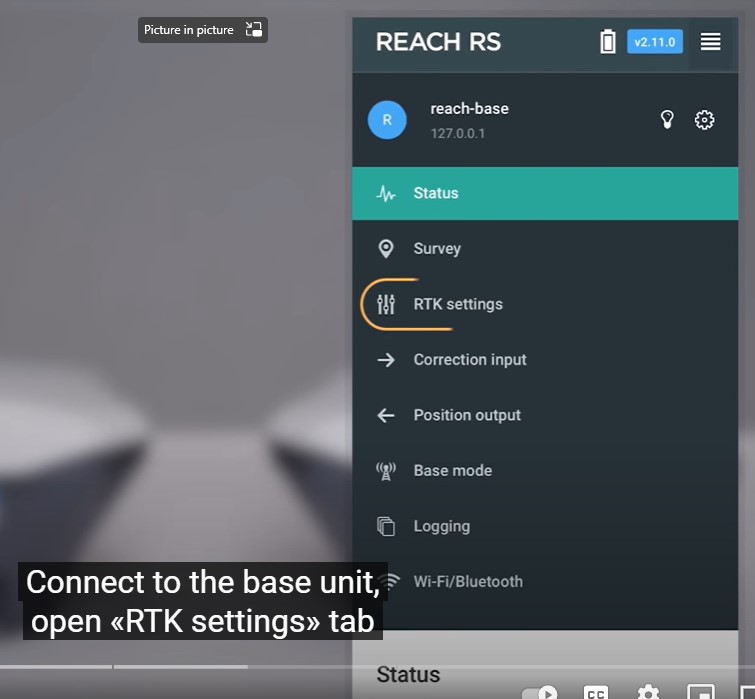
I can’t find this page my reach3 app to make precise LoRa settings; maybe cause these have become auto thru a later reach3 upgrade? this page is missing:
Kenforestry, not sure if you seen this information from Emlid and with information from Dave Pitman about setting up the Autel Evo II Enterprise RTK using the Emlid Reach RS2/RS2+.
It definitely helped me when setting up a local NTRIP connection to a WiFi hotspot that both Reach RS2 and the Autel Smart Controller shared. I haven’t tried using the WiFi output from Reach RS2 and connecting the Smart Controller to the Reach RS2 WiFi connection. Nor have I tried using Emlid’s Caster solution yet, but will be doing so when time allows.
I liked to thank Emlid, Dave Pitman and Michael Lambert, aka chascoadmin for their input & advice on this forum for using the Autel series of drones with the Emlid equipment.
Kenforestry, from my understanding the Autel controller is expecting to receive corrections via a NTRIP connection. It doesn’t know how to talk to Emilid’s “LoRa”. With local and Caster provided NTRIP solutions, you do have a couple of different ways to connect.
Regards, Mark
Mark, I suspected as much and had read the article you referred me to, which is a good how to for a local ntrip. I just wanted to verify that LoRa is not an option for evo. I think it’s what I’d use if I had a second emlid and didn’t want to do ntrip. We’ll test the evo with a local ntrip. Thank you.
I didn’t know the autel evo had a dedicated base station; the dealer sells emlid with the evo, as the base, but I believe you, that evo will only accept ntrip.
It has been advertised but I haven’t seen any mention of it in a while so I think they took the hint. Many of those resellers were already Emlid distributors. We had the same thing with the Yuneec H520E RTK. I didn’t even try their base. Right now our standard workflow is to set a base point with the RTK network or our own CORS and then do local NTRIP to the drone. It has proven the most stable. Running directly off the network is awesome but dropping to a float in the middle of a run is not cool and we have seen too many connectivity issues in Central Texas after the 5G release. It’s great if you are within 1,000ft of it but the signal quickly dissipates and you end up with timeouts. Even worse though 4G LTE has apparently taken a hit as well and you have to tell your phone specifically which network you prefer.
thank you, admin. We’re operating in remote Nevada, so we also intend to use pre-existing control points to push out a local ntrip correction. Thanks for commenting on the H520C; we have a gov study group considering that bird for both its hev lift and mapping ability. You’res is the first comment I’ve obtained after trying to get info out of the Chinese distributor. I wonder if the H520 could be corrected with emlid?
Some nice advice is already here, but I’d like to sum up everything.
Reach LoRa radio works only for RTK with other Reach receivers. For instance, you can connect Reach RS2+ base and rover via the built-in LoRa to collect ground control points in RTK.
Drones normally have multi-band GNSS onboard, so you need a multi-band base station as well. Reach RS2/RS2+ can work as a base for both Autel EVO and Yuneec H520E RTK via NTRIP.
Ksenila, thank you for that comment; one of our sections is so impressed with the test accuracy results that we obtained, that they’ve decided to order two emlids for base-rover, so I’ll pass on your comment that we can use LoRa for that. brief summary: we did 11 emlid captures, over 4 high order monuments and processed the emlid rinex files thru opus rapid static. We obtained approx an average of 4 inch accuracy both vertically and horizontally. The best result was averaging 3 15-minute captures. we got 0.04 feet accuracy vertically
Just a warning about Yuneec, my company and I started with a Yuneec H520 (before the rtk gps options), Yuneec’s batteries are garbage (three bricked from over swelling) and we had lots of continuing issues with the controller. Also Yuneec’s customer service is pretty much non-existent in the USA now and they released ultra buggy updates that would sometimes ground the bird for weeks until they fixed the update. We pretty much ignored their updates until it was proven that no one on the forum had issues with them, they may have fixed this now but I’m pretty sure they don’t bother updating the older H520 anymore so I can’t say.
On the other hand, our EMLID units are awesome as well as their customer service. Yuneec should take note.
Thank you thercules, I updated the gov study group’s research with your comment on H520; such comments are gold. My agency has learned the hard way limits and problems with equipment.