Hello everyone.
Continuing with the tests, I did 16 occupations in a landmark that I installed on the roof of the building - 100% open sky.
I evaluated two antennas in the test - the aforementioned GRADE (Navspark model GRADE ANTENNA - Survey Grade Antenna - NavSpark Store) and the recently acquired BT170 (https: //beitian.en.made-in- china.com/product/zsLEdNUjGyWw/China-Beitian-GPS-Module-Receiver-Antenna-Rtk-Gnss-Antenna-GPS-Glonass-Bds-Galileo-High-Precision-Survey-Antenna-Bt-170-D-SMA. html) - 8 occupations with each antenna, each occupation lasting about 1 hour with a baseline of 18km.
The receiver used was the M2 with version 2.22.5 of reachview, tabulated as “M2_5” so as not to be confused with the measurements I had made with the previous reachview - tabulated as M2.
To eliminate outliers from the analysis, I followed the steps: (1) I eliminated the first 5 minutes of screening; if the data was not yet within an acceptable range; (2) I eliminated the initial 10 minutes - if the data still showed anomalous values, I considered only the data with Q1. If none of these actions corrected the data, it was removed from the analysis completely.
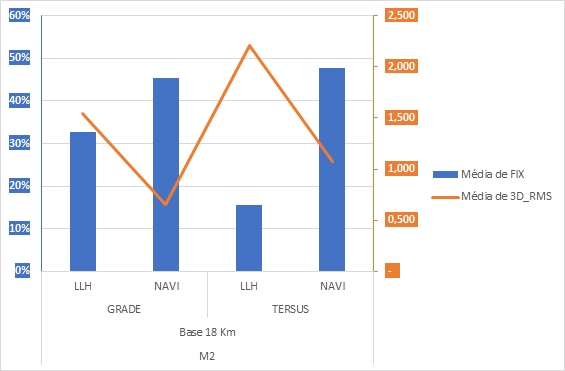
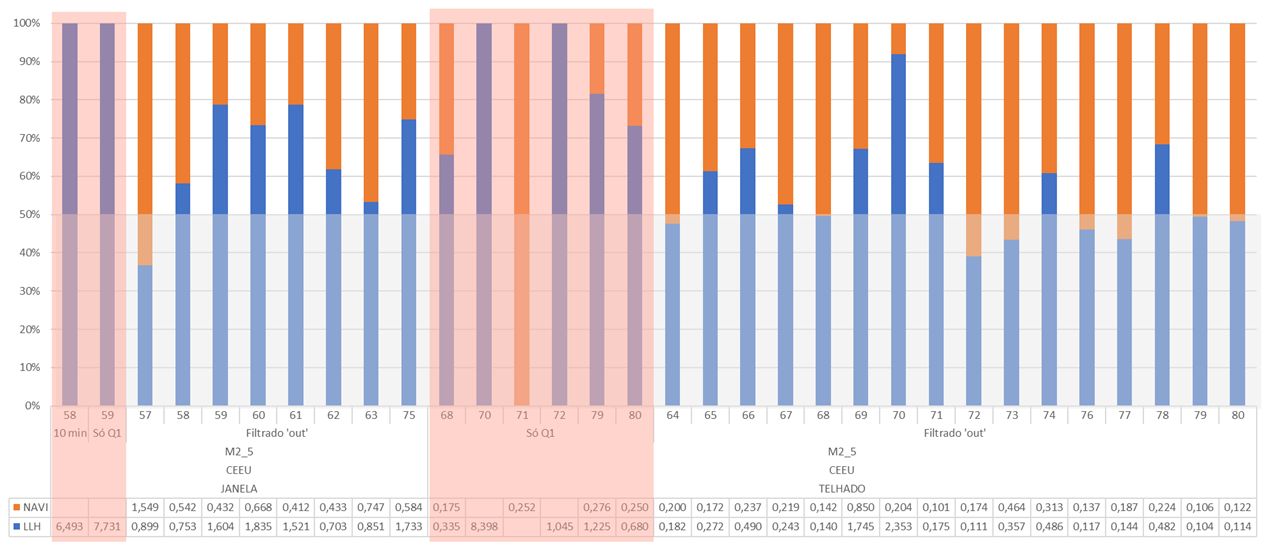
The figure below shows all occupations of M2_5 in WINDOW (JANELA, poor signal reception) and ROOF (TELHADO, open sky), comparing the accuracy of the LLH (obtained by REACHVIEW) and NAVI (obtained by DEMO5) results.
The red part shows the filters that were done to eliminate outliers.
From the figure it is possible to see that the LLH solution tends to be less accurate than NAVI, since the bars in BLUE are larger than the ORANGE ones - if they were the same size, the two solutions would be the same. It is also noticed that this behavior is valid for both the data of the WINDOW (JANELA) and the ROOF (TELHADO).
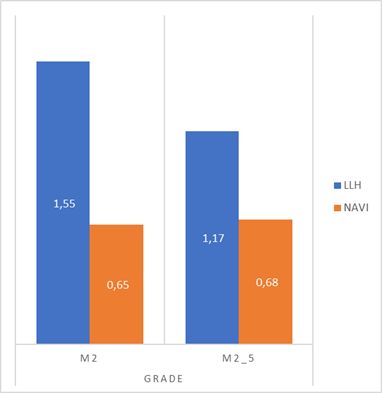
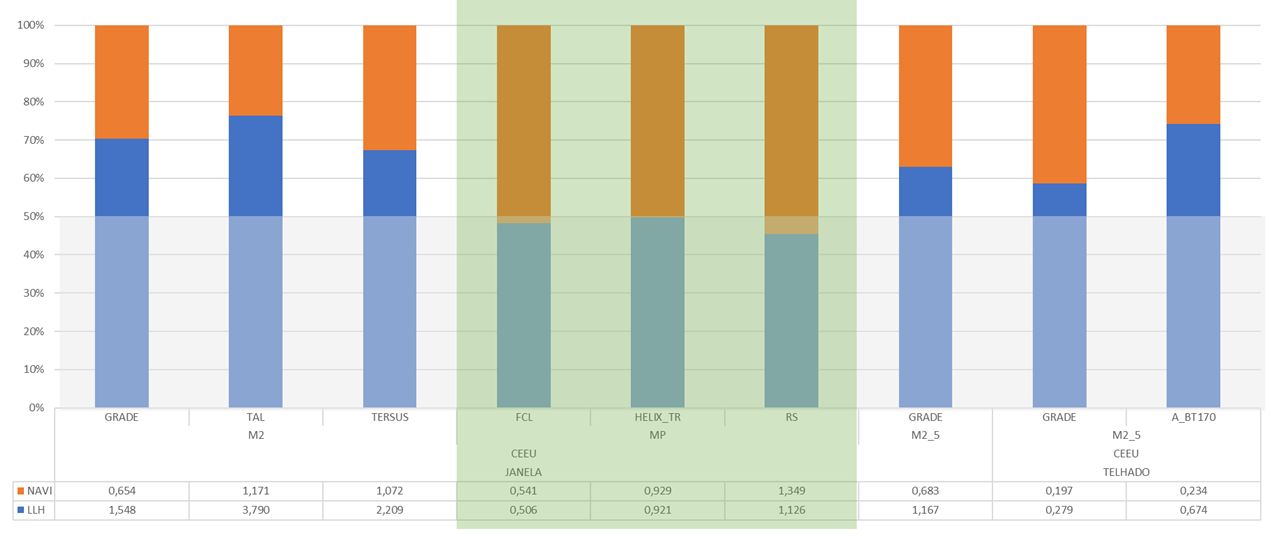
In the figure below I present the averages of the solutions for occupations with M +, tabulated as “MP”; M2 and M2_5 (MP solutions are highlighted in green).
The bars present the results for the different antenna models that were used.
For the M2, the aforementioned GRADE, TERSUS and BT170 gain the company of the Tallysman TW3865 antenna (https://www.tallysman.com/app/uploads/2018/09/TW3865_TW3867_Datasheet_rev3_7.pdf), tabulated as “TAL”.
For the MP, two implementations of the TW2406 (TW2406 Embedded Single Band GNSS Antenna | Tallysman) were used - a DIY with a 10 cm ground plane (tabulated as " FCL “) and an inheritance from a EMLID REACH RS receiver that no longer works (tabulated as” RS "). In addition to these two versions of the TW2406, a helical antenna was tested which does not know the make and / or model - tabulated as “HELIX_TR”.
From the figure you can see that the LLH and NAVI results of the MP receiver are very similar to each other (the BLUE and ORANGE bars are the same size) … for the M2 and M2_5 results, the trend is that the ORANGE bars are smaller - regardless of the quality of satellite reception (WINDOW - JANELA, or ROOF - TELHADO) and regardless of the type of antenna.
To which, I conclude: to compare the RTK processing capacity between reachview and rtknavi, it does not matter if the signal quality is the best possible (TELHADO - ROOF with clear skies) or with a poor reception quality (JANELA - WINDOW with partially overcast sky) .
I also conclude that there is a good margin for improvement in the LLH solution, because in all scenarios, the tendency is that the LLH result is worse than the NAVI!
I hope that my evaluation effort will serve as an inspiration for other colleagues in the community to test the equipment and, thus, we can assess whether we are getting the best RTK result that the product can generate … and if we are not, that the team EMLID can implement the appropriate adjustments in the reachview (either by RTKLIB or another solution that is being used).