You can convert the base log to .obs using the RTKCONV module from RTKLib. Simply select the .rnx file as your input but in the format dropdown, select RINEX.
On the other hand, the .rnx file is already a RINEX log so you can use it directly in RTKPOST. I processed the files you linked and it gave a resulting .pos file although the solution for every observation was float (Q=2).
Hello,
Thanks for the help, I confirm I could process the RINEX log using RTKPOST. The float was expected because the base is too far from rover, however I wanted to process it anyway.
So, I tried a different base 100km away, recording data once every 15s.
I understand the baseline is high, however shouldn’t a FIX solution be possible even on those conditions?
This new base RINEX log is on the previous shared google drive link.
Fixing will be hard (or just short of impossible) at those distance, especially for a kinematic solution, and especially with such a short observation time.
I tried processing against a few station from RBMC, but the closest is 92 km, so not optimal.
To build on Christian’s point, I tried processing the track through NRCAN’s PPP. The result isn’t very good, RMS is around 1.8m for X and Y. For some reason only 11-12 satellites were visible, and the GDOP was around 2.
Overall, I’d say that if this track is similar to your intended use, unless you can find closer reference stations you will need a second unit to serve as a base station (even if you just post-process).
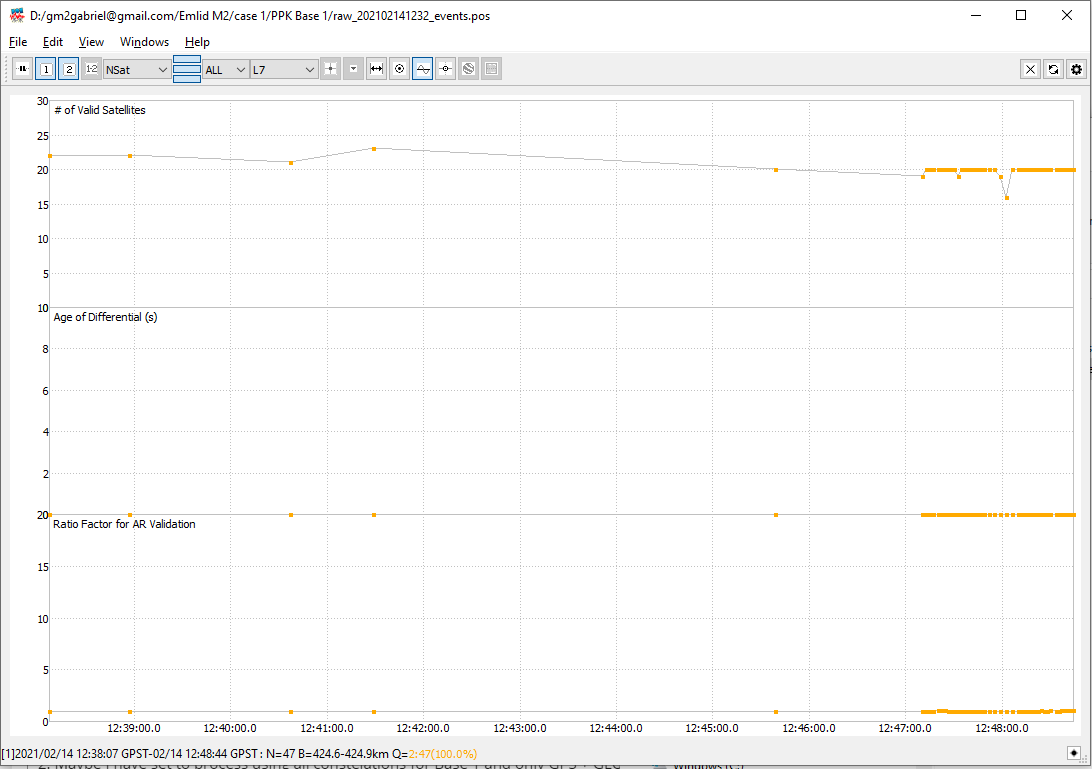
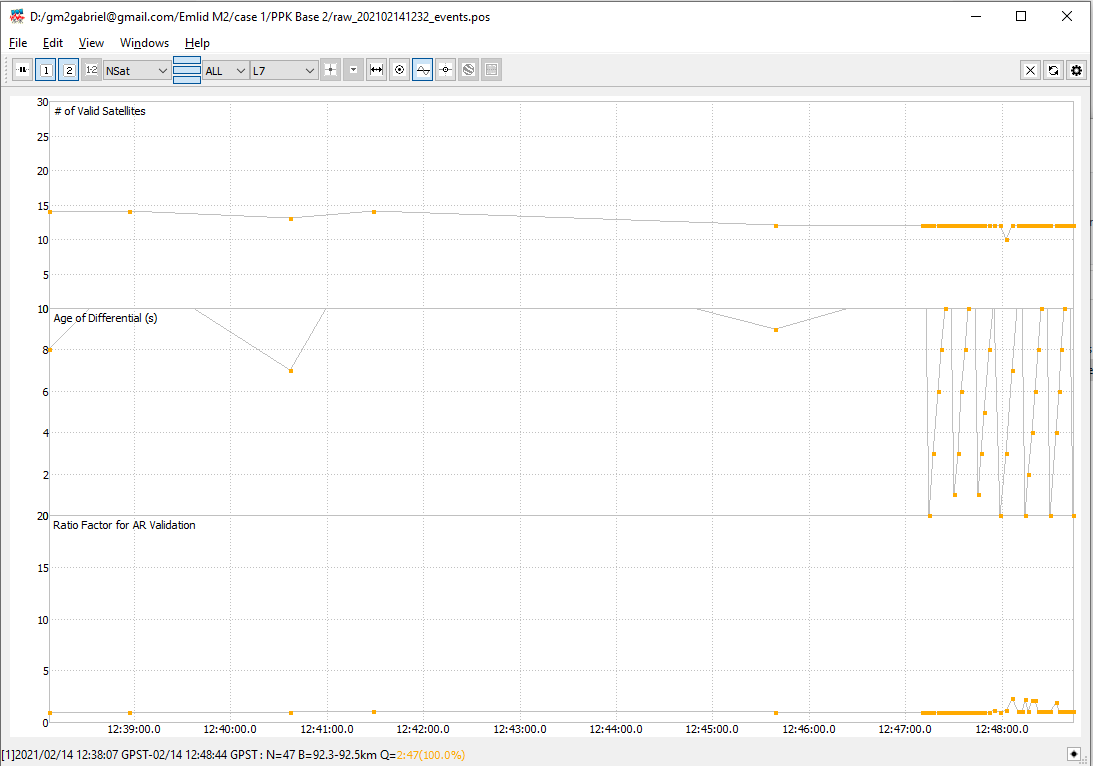
I have processed the track and events using both reference bases, I don’t know why but I have a different number of satellites visible for each case, around 20 for Base 1 and around 12 for Base 2. Maybe I have set to process using all constelations for Base 1 and only GPS + GLONASS for Base 2.