I have been running a reach PPK system on a UAV and I am struggling to get accurate results, with offsets circa 2m when comparing against checkpoints. The offset across a project is typically 2m in y, 0.3m y and 1m z. The offset is roughly constant across a project… so its like its a fixed error??
Im sure it is an error somewhere due to processing but I am at the limit of my understanding and looking for some suggestions.
I am experienced with PIX4D and confident that its not the photogrammetry processing causing the issues.
The base (reach RS+ is positioned over a known survey point (sub 10mm accuracy).
Survey point coordinates (+53.60437489, -1.0291630077, 54.750)
The RS is mounted on top of a 2m pole with the brass adaptor (I believe this is 22mm)
The M+ antenna is mounted on a ground plane, 10cm vertically above the sensor origin.
I am following the PPK processing document from the Emlid website.
If its of any help, please see link to UBX data:
When processing I am inputting the base coordinates into RTKPOST as well as the antenna offsets.
Its had me thinking… we used copper tape as a ground plane, but the surface where it is mounted is not flat. Could the curve of the surface and or the copper tape be the cause? Im thinking that maybe a curved ground plane could cause a really noisey reflection/multipath?
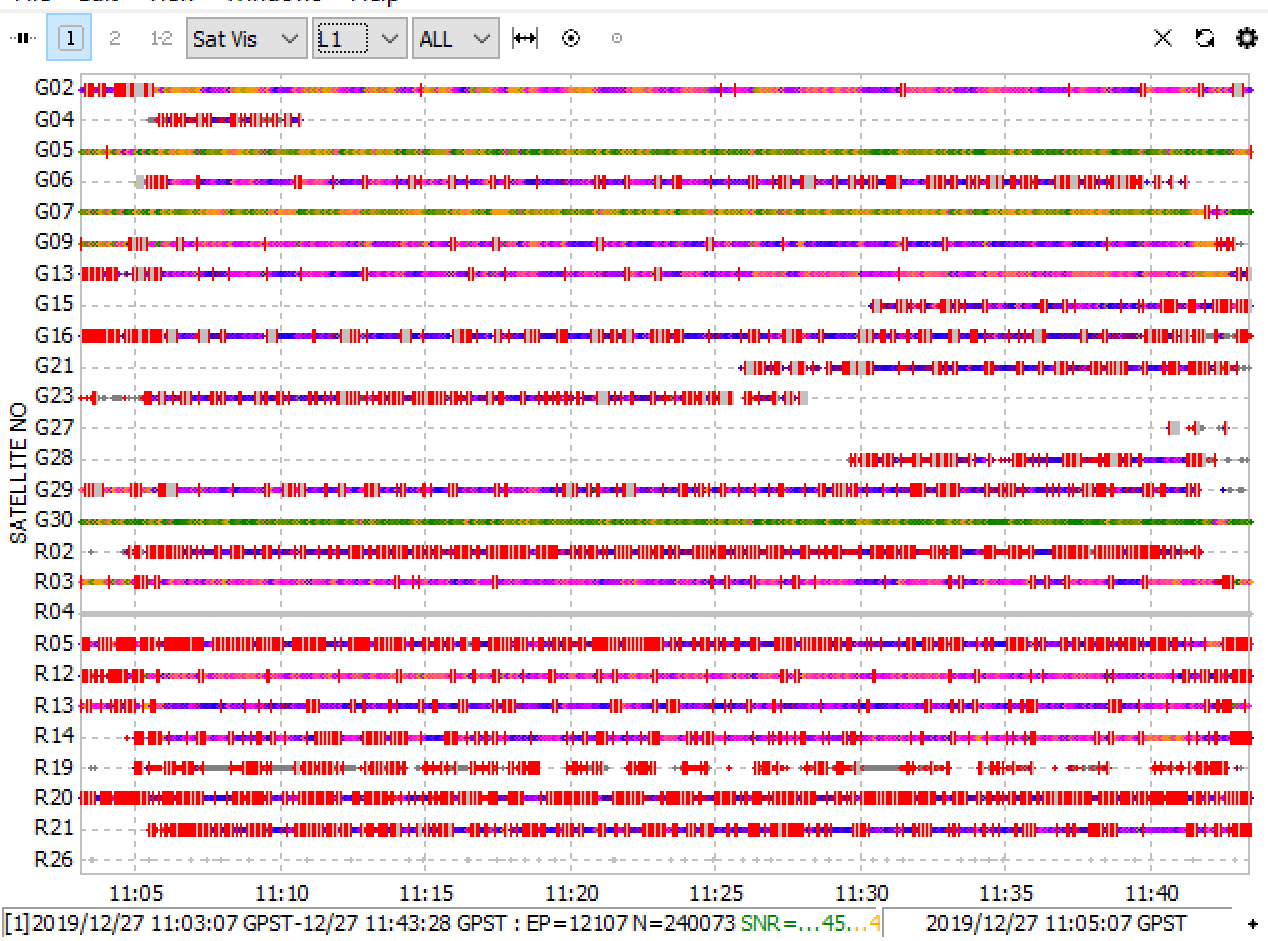
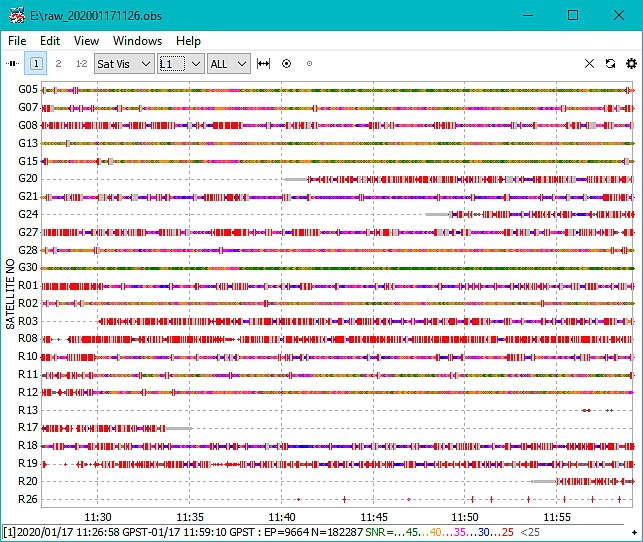
I checked your data, and it seems that Reach M+ still can’t receive the stable signal. I attached the screenshot of your logs from RTKLib. It has a lot of cycle-slips and no one signal with a stable SNR value of more than 35.
Please, could you share a photo with your new setup?
It’s likely that some of the internal components affect the Reach M+ module, not the antenna. You can start by providing the Reach with power and checking the quality of the logs. Then you can power each of the drone components in series to determine which one affects the signal.
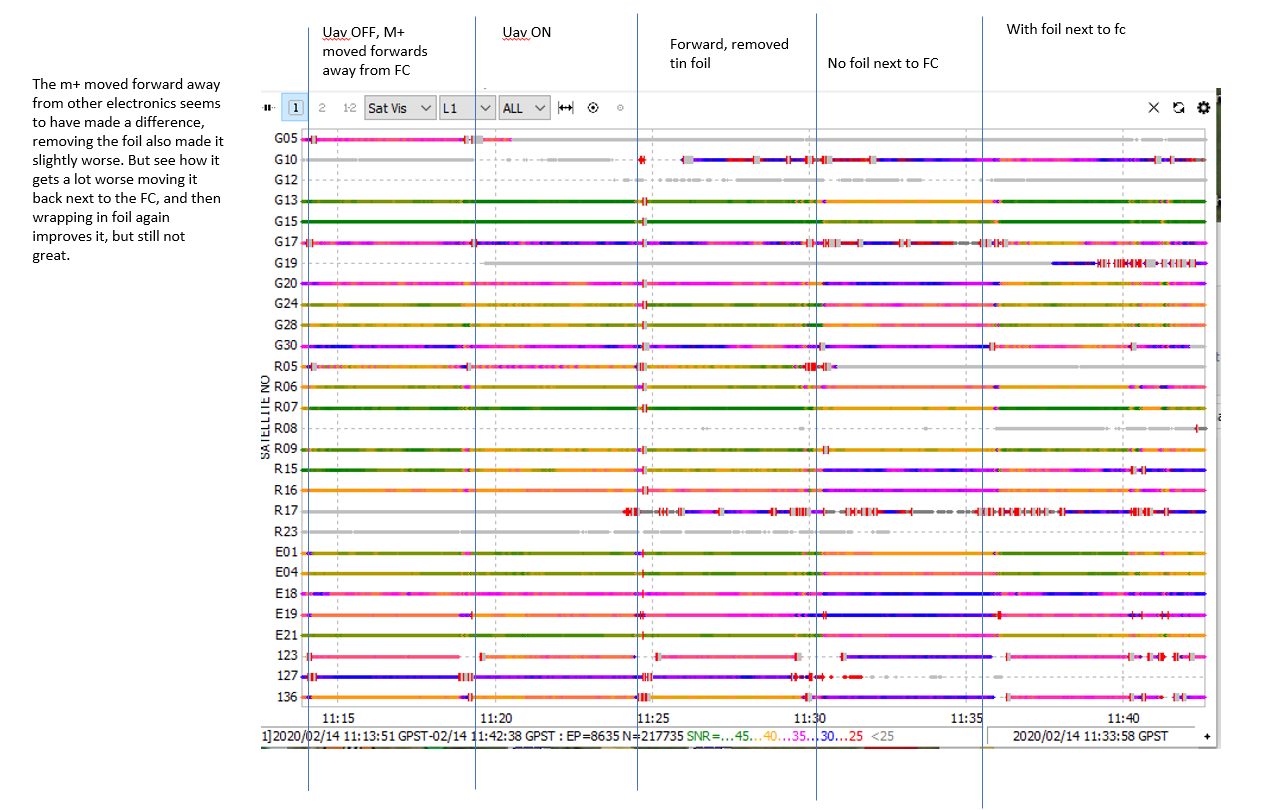
So had a play this morning and noticed that moving the location of the m+ made a good differance… the following log is of the UAV setup as…
M+ powered by usb battery bank, wrapped in tin foil and moved 300mm forwards away from the fc and other electronics.
Camera powered by internal battery (not the normal power supply from the UAV)
Made a change every 5 minutes so it could log for a while with one setup to see how it affected it.
0-5min m+ powered on, nothing else
5-10 m+ powered with usb and UAV powered on (all electronics on, telemetry, rx, camera etc)
10-15 removed the foil
15-20 placed m+ near old location next to FC without tin foil
20-25 m+ near the fc, added tin foil.
I think it shows there is obviously more EMF noise near the FC and other electronics.
This doesnt test the m+ powered by the UAV and the camera powered by the UAV, I will do that this afternoon and see.
But generally the log looks way better with the FC forwards. (in my uneducated viewpoint)