I am using an M+ with a reach RS as a base, setup over a known location. I am surveying in the base over the known location and then collecting PPK data during a drone survey. After the survey then postprocessing the data to get accurate GPS tags for the images. The processing is coming out well with RTK fix but when processing the images with the corrected GPS information I am seeing large differances between the photogrammetry calculated model and reality (5-10 meters). I have seen that many people are achieving sub 10cm accuracy and thus I must be making a mistake somewhere…
Any hints of tips?
Is this from a setting issue within hardware or likely from post processing?
Based in UK so comparing against OSGB (OSTN15)
Camera A7Rm2
Drone height ~120m AGL with GSD of 1.5cm
Drone speed circa 14m/s
What additional information will help?
I dont needto achieve cm accuracy but would be good it is was sub 1m and ideally would be lovely if it matched some of the results others are getting sub 10cm!
Hi @hairyape1, I’ll give it a run! I agree that sub-meter accuracy should be easily achievable.
First, a couple of quick questions,
What are you using for the photogrammetry process?
What application are you using for post-processing?
What is the typical size of your projects?
What lens are you using?
Are you using any GCP’s?
Do you do any point cloud editing?
When you say accuracy, are you speaking of staking out the actual drone surface? Or staking out checkpoints?
A couple of observations,
Optimal AGL is about 80m. Getting to 1cm/px or below is needed for sub-decimeter “absolute” ground accuracy without GCP’s.
Even with your camera 14m/s is at the top threshold.
Make sure to enter very precise antenna heights. No matter how accurate your base-point is a bad antenna height can be an exponential error. Especially if there are discrepancies between both receivers.
Pix4D and or agisoft for processing - I am very experienced at both so hapy with either.
RTKlib for postprocessing using the methodology on the emlid docs.
Projects can be large (12k images plus) but more interested to get this accurate over smaller projects.
Sony SEL35F28Z E Mount Full Frame Sonar T 35 mm F2.8 Zeiss Prime Lens
GCPs are used normally, but im interested ti increase the accuracy of the data without GCPs to get the PPK solutions working as well as they can before adding in GCPs so the numbers first quoted are for projects that have not been corrected with GCPs yet and just comparing against checkpoints.
When accuracy I mean staking out of the actual drone surface eg… I have a accurate (sub10mm) point for the reach rs, carry out a mission and then postprocess PPK geotags and then process the images using these. With the aim of getting the surface as near to global real position as possible before adding any GCPs.
Agree and understand on the AGL/1cm GSD comment
Agree with 14m/s ideally I try to maintain 10/11m/s but it depends on wind conditions
Interesting on precise antenna heights, I have the M+ antenna mounted directly above the camera lens about 10cm + Z. But for calculations i have never taken this into account assuming it would just shift the entire dataset vertically by 10cm… but thinking about it more I suppose it also affects as the UAV rolls.
And for the Reach RS I have always measured to the bottom of the unit assuming this is the origin?
Are there settings in RTK lib that could be causing errors?
Or do things like SNR etc also cause issues? - I dont really understand what these should be set at etc so welcome any pointers.
Those are both great programs! Agisoft is a little better in my opinion.
Glad you are using RTKLIB because I am not familiar with EZSurv. …and understood on the desire to cut GCP’s. That is the big fad right now with all the PPK and RTK technology hitting the drones. In our efforts we need 0.10ft accuracy so everything I can squeeze out of the drone is needed. I will say that I have been able to go from 10-15 GCP’s per 50ac down to 5 or 6 without affecting accuracy now that I am using PPK. As long as they are well gridded you could use 4 in some instances, but if you do use GCP’s never go below 4 and make sure the 4 encompass the site as best as possible.
I am also glad that you are staking your surfaces. When you see reports of 2cm accuracy, they are usually talking about relative accuracy of the map to itself, not absolute local accuracy as we want. In my opinion this was a fail with the Phantom 4 RTK’s marketing. The other fail that is now coming to light is that RTK is not suitable for consistently reliable maps. A couple of blips in the RTK fix can be really bad for a map.
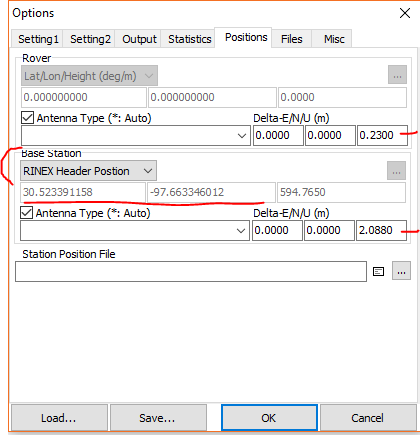
Antenna measurements can be accounted for here. As well as manually entering your known point.
The Tallsyman antenna should be measured to its center and the base is 65mm from the bottom of the receiver and 87.5mm from the bottom of the brass adapter if you are using it. A 2m pole would then be 2.088m or so.
One more note is that my average stakeout accuracy is about 5-6cm right now. That is the average across the site. The key to understanding this is that on smooth and/or well-edged surfaces I can get 1cm, but across dirt it is typically at best 5cm on average. The 1cm is crucial for paving and building pad construction. If someone is getting better than that I want to know how!