



Hi,
I have:
-1 RS2. 2m above ground.
-1 M+. 1m above ground.
I wanted to try RTK with Emlid Caster Beta, using M+ as base and RS2 as rover, as it is easily to manipulate RS2 as a rover. They were 9m away from each other and the place is clear with no obstructions.
M+ was static on a know point and RS2 was also static on another point. It was difficult to get a Fix on RS2 and when it got Fix, it became float again. I tried 2 different RTK settings on base:
-Positioning mode Kinematic and GPS AR mode Fix and Hold
-Positioning mode Static and GPS AR mode Continuous
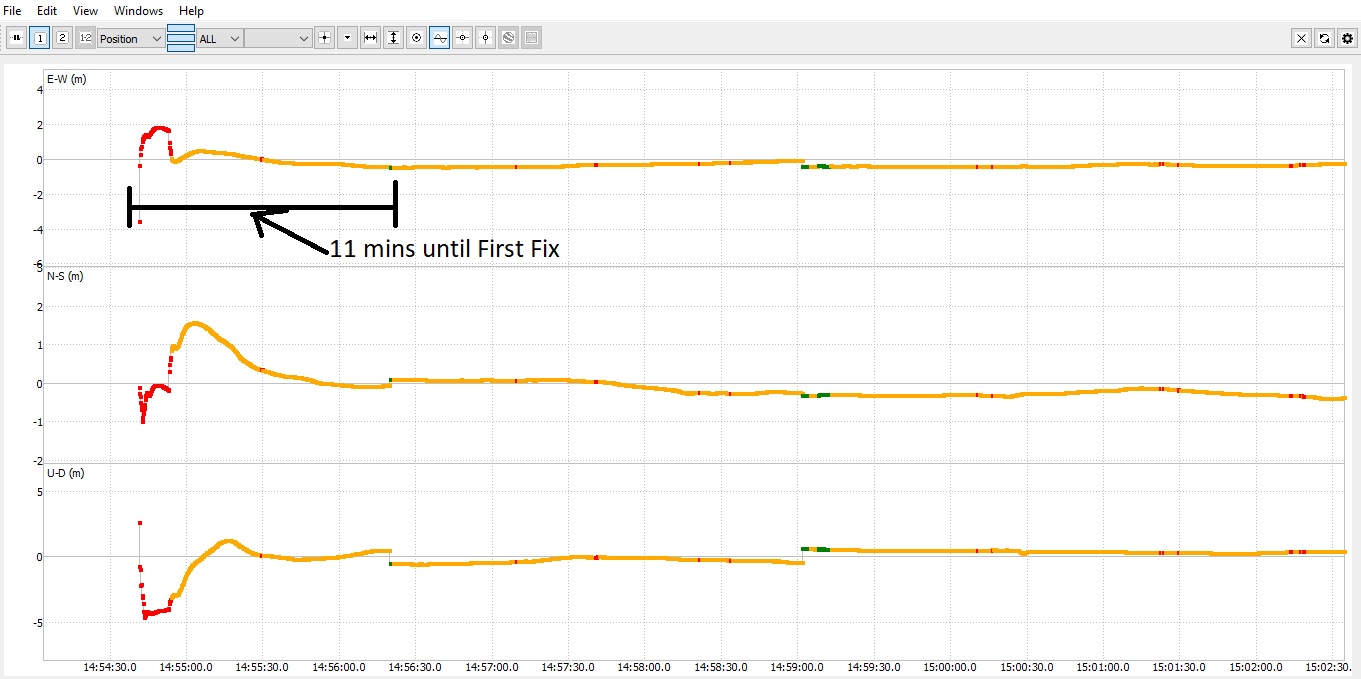
But it was difficult to get a Fix. 11 minutes until first Fix, and went Float again:
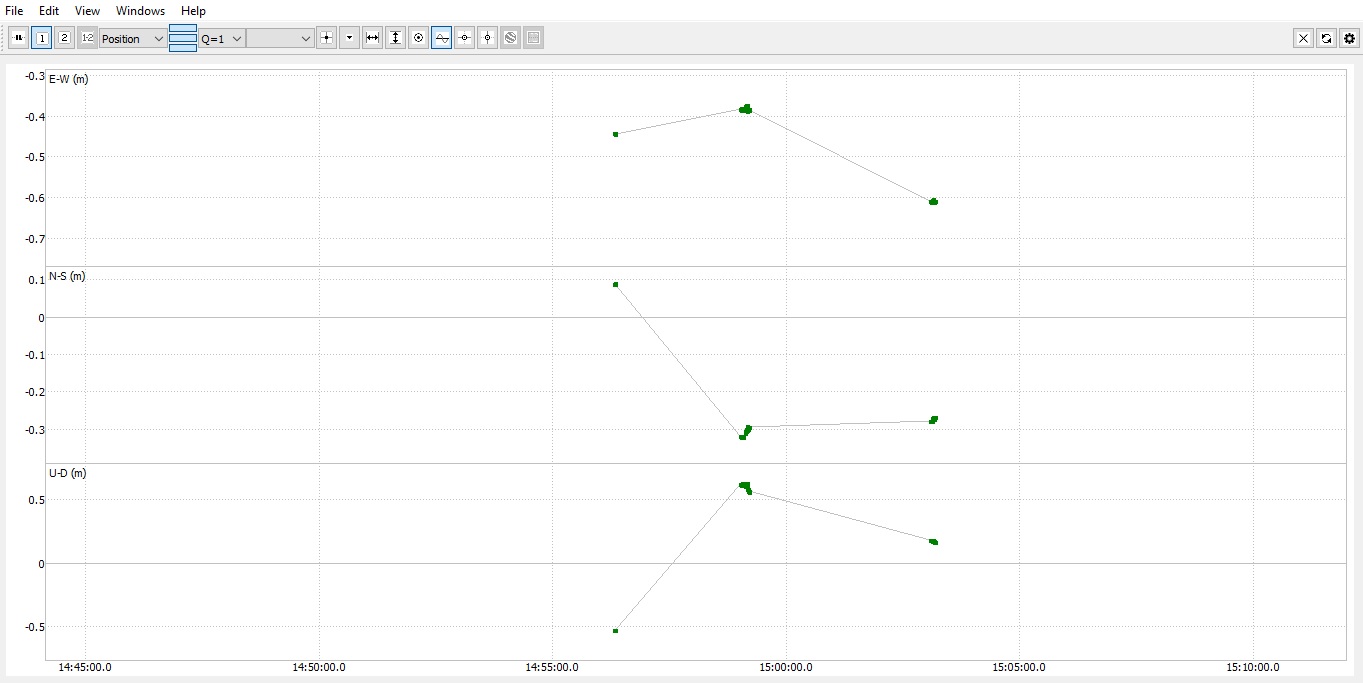
This is the “Position Tab” from the LLH file on RS2, where there is a variation on X, Y, Z in Fix coordinates, RS2 being static on the same point.
-What am I doing wrong?
-What are the best RTK settings on M+ Base? (GPS AR mode, Positioning mode, etc)
-Is there a minimun time to wait since M+ is L1 only?
After that, I changed correction input to a Ntrip base 77km away and it got Fix much faster, but since it is 77km away I can not trust the result.
I’m doing these tests because I would like to buy another RS but I still haven’t been able to get 100% reliable results.