



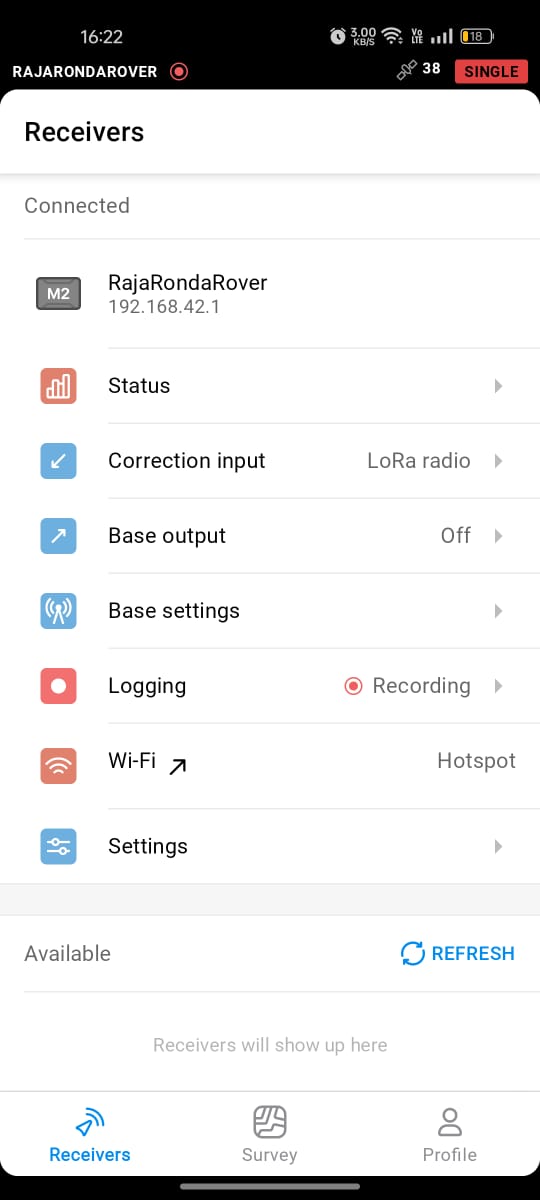
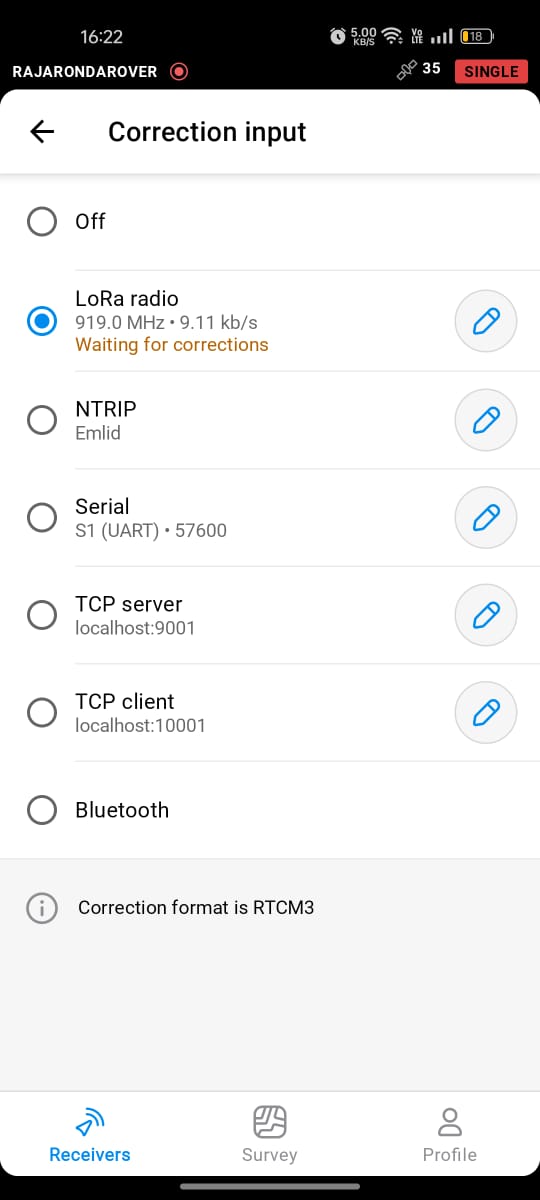
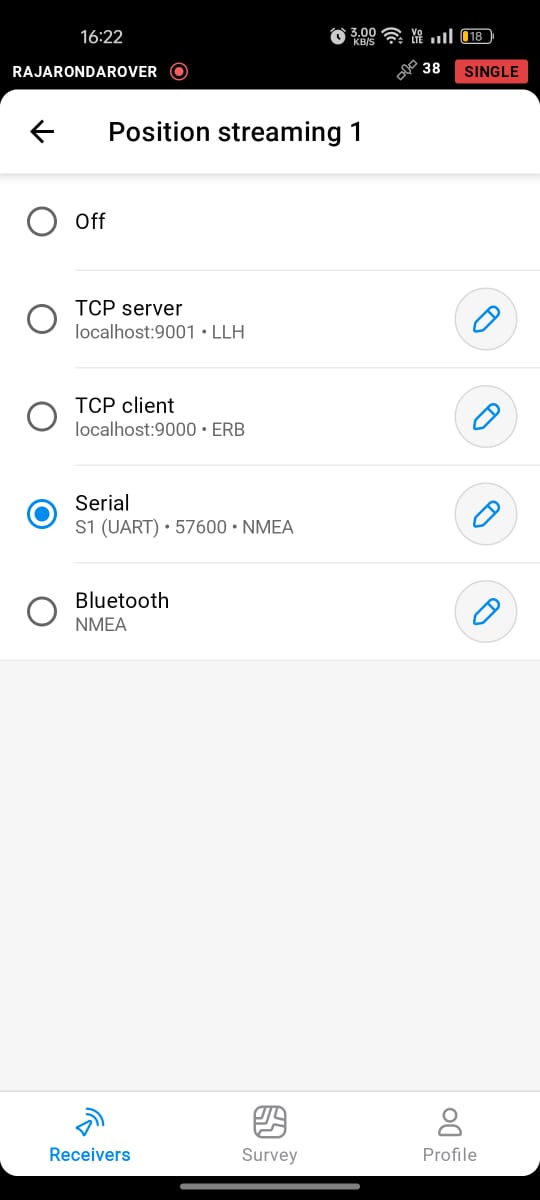
I want to use the Emlid RTK setup for my drone. My drone with the Orange Cube flight controller is connected to the M2 from the Telem1 port to S1. Then, the LoRa radio is connected to S2. I’m using the LoRa radio as the correction input for the rover. The position streaming is set on serial S1 with UART 57600 and NMEA. However, it keeps waiting for the correction input and never receives it. The status remains ‘single’, and ‘float’ or ‘fix’ never appear.
[https://drive.google.com/drive/u/0/folders/14SemgndjbyadGZ1rTqv2WWHhEDj5Ior-]
I want to use the Emlid RTK setup for my drone. My drone with the Orange Cube flight controller is connected to the M2 from the Telem1 port to S1. Then, the LoRa radio is connected to S2. I’m using the LoRa radio as the correction input for the rover. The position streaming is set on serial S1 with UART 57600 and NMEA. However, it keeps waiting for the correction input and never receives it. The status remains ‘single’, and ‘float’ or ‘fix’ never appear.

Hi Haris,
Welcome to our community!
Can you please share the configuration of your base? Do I understand correctly that it sends corrections via LoRa radio, but your Reach M2 isn’t receiving them?
Please also share a photo of where the Reach M2 and its antenna are located in your setup. Thanks!

Yes, we have set the correction to m2 via LoRa radio. We haven’t finalized the location for the antenna yet, but we have placed it far from the GPS antenna.
Hi Haris,
Thank you for the photo!
To receive corrections with Reach M2 via LoRa radio, you need a Reach base that transmits them, also via LoRa radio. Do you have it configured?
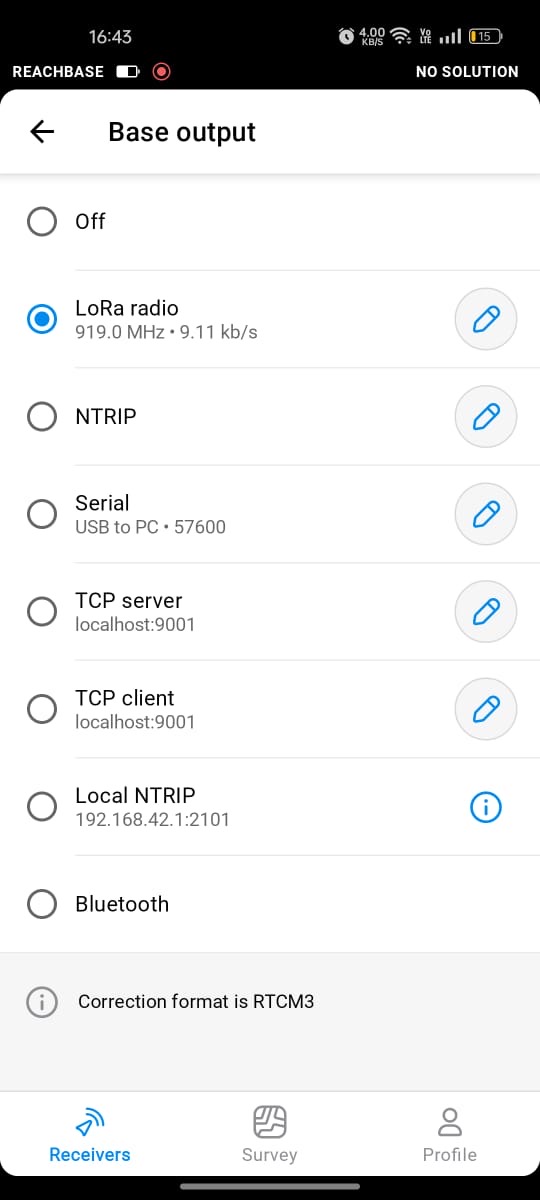
If so, please send me a photo of how it’s set up and a screenshot of the Base output screen from Emlid Flow while connected to the base. Thanks!

Haris,
I see. Thank you!
Then, let’s test the setup over LoRa radio the following way. Please place both receivers with an open, clear sky view, average the base’s position using average SINGLE, and configure RTK via LoRa. Then, let’s record the following logs with both units for at least 10-15 minutes:
- UBX raw data log with enabled raw data debug option
- Base correction log in RTCM3 format
- Position log in LLH format
Please ensure that the devices have a clear line of sight and that the LoRa antennas are firmly attached.
Once the recording is done, generate a full system report on both receivers and share them with me along with the recorded data. It may contain sensitive information, so feel free to email it to support@emlid.com. Thanks!
Which setup needs to be input of lora?…rs2 or m2?…because rs2 is for my base so supposedly its base output is lora while m2 for my uav, correction input is lora right?…plus, does it need for base(rs2) to receive correction input and rover(m2) to have base output?
Haris,
Yes, you’re right. On the Reach RS2 base, let’s set the Base output to LoRa and the Correction input to Off. In the meantime, on the Reach M2 rover, the Base output should be Off, and the Correction input should be LoRa.
This guide from our docs covers all the steps for setting up RTK with LoRa.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.