I thought I would share my first build for interest, and provide some of the lessons I learned.
- RCTimer Spider Frame
- Universal GPS folding mount
- 4x RC Tiger 30A ESCs
- 4x RC Tiger MT4006-13 740Kv
- 4x APC 10x47 Props
- 3DR PPM Encoder
- Turnigy 5000mAh 4s1P Lipo
- Hobby King PDB
- FlySky FS-TH9X 2.4GHz 9ch Transmitter
- FlySky FS-R9B Receiver
- Arduflyer/APM Power Module XT60 Kit
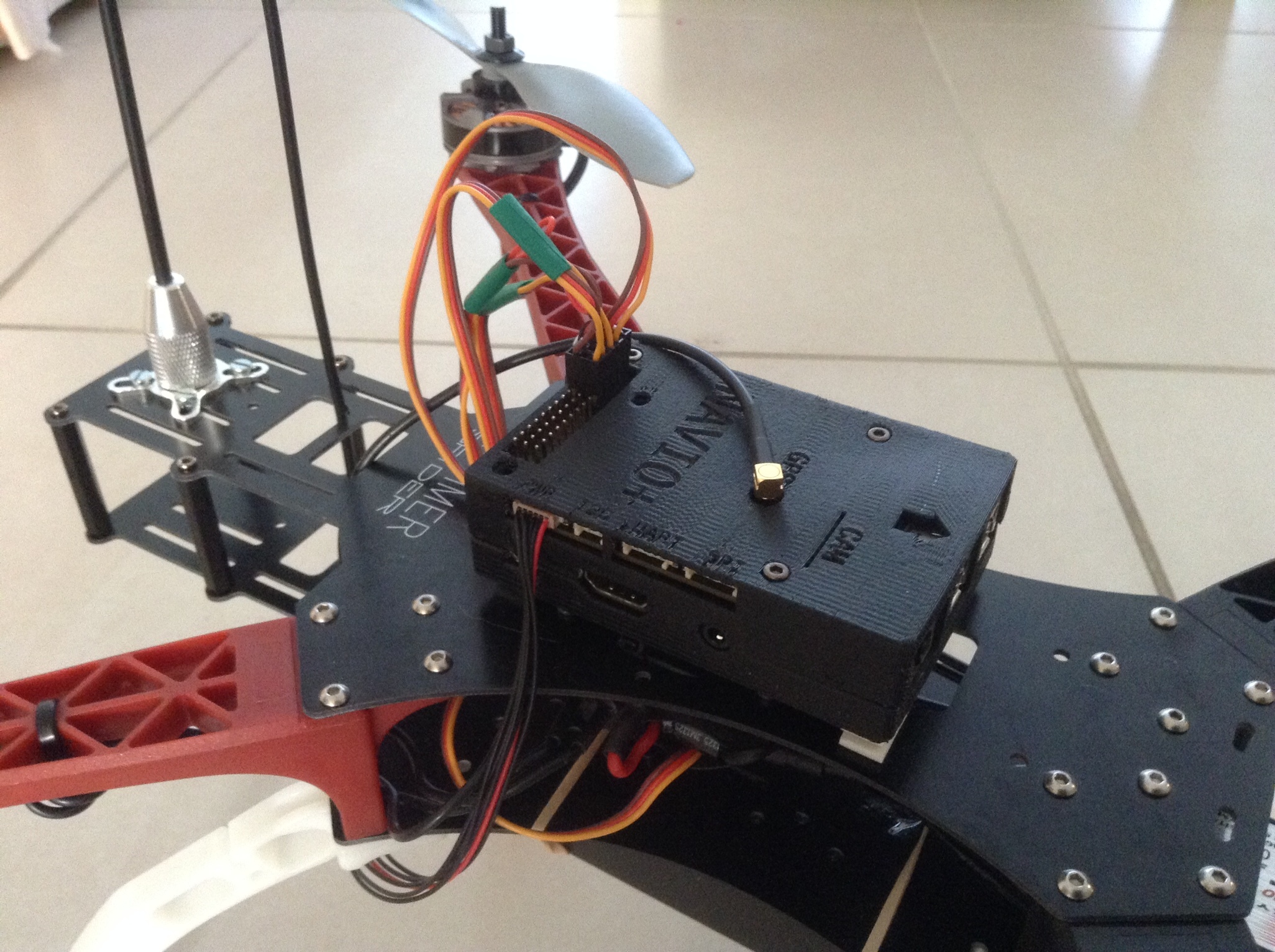
- Raspberry Pi 2 Model B
- Navio+
- 3D Printed Navio Casing
- GPS/GNSS antenna MCX
Some lessons learned along the way:
- If possible, find a battery (and charger) which has the same connector as the power module you are using. If not possible, you will need to solder the connectors on yourself as I did.
- Rather use a PCB for power distribution than trying to solder wires of the ESCs together and making a mess. Its much neater.
- Calibrating all the sensors on the autopilot is much easier if you can afford telemetry with your build. In my case, I had to use an Ethernet cable hooked up to my wifi modem at home. The cable gets in the way when you are, for example, calibrating the compass.
- Some proficiency with using the terminal is great for trouble shooting communication problems between the GCS and the raspberry if your GCS is installed on a Linux based OS.
- Make use of the Forum!
What lessons have you experienced during your first build that might serve good advice to newbies planning their first build??