Hello all!
This is another attempt at a post in a different section about the issues I’ve been having with one of 4 Reach RS+ that I’m using.
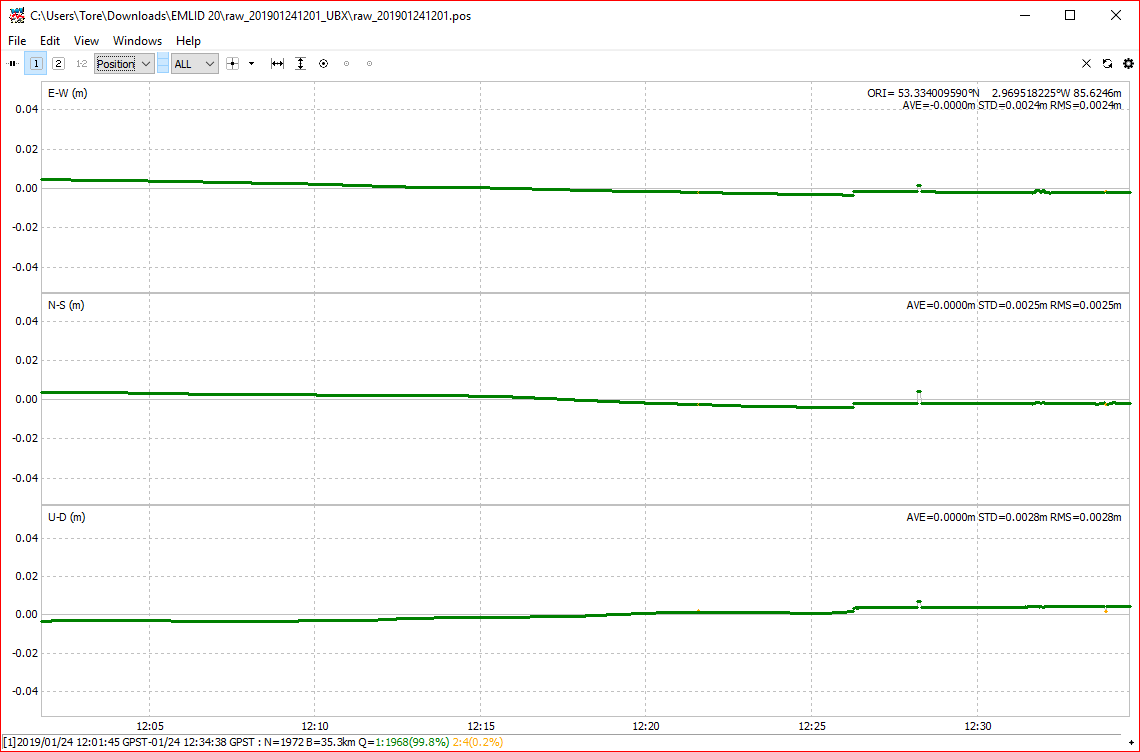
Having conducted a position verification over a known point (verified with a Leica system as well as 3 other Reach RS+), the height value for the final system wanders greatly over the space of 45 minutes, ranging from +30cm to -20cm between the observed point and the control point, but is always decreasing (there’s a large random step of 5cm after 20 minutes). This results in a large standard deviation of around 14cm, however the Lat and Long standard deviations are negligible. As I’m logging data for roughly 30 minutes to obtain a good dataset to work with, the height finally levels out aftter roughly 25 minutes. Strangely, when I do some processing in Excel with the .LLH file, the height actually averages out to within 3cm of the verified CP.
When starting up the systems, the 3 ‘good’ ones obtain in the region of 12-15 satellites immediately and most of them have a good signal to noise ratio in the status window - plenty to safely work with, whereas the system in question takes about 5 minutes to recognise more than 4. This figure does increase in time, however, the solution status never becomes fixed, which is the results that is needed and all them ‘seem’ to either be in either ‘float’ or ‘single’ when observing in status. Corrections are provided via NTRIP over 4G (through an iPhone) in all cases. Pole height is set to 2.0m plus the adaptor (2.0865m) and the mask is set to 15 degrees.
The way I’ve been connecting everything up is as follows:
Power up Reach
Connect laptop to Reach via wifi (then typing 192.168.42.1 to connect to ReachView)
Connect Reach to phone hotspot
Connect laptop to phone via hotspot
Connecting to Reach via browser (typing Reach IP address into browser)
Compared to booting up an ageing GX130+ (the menu is still in monochrome!), these systems are really good in the sense that you can almost “plug and play” with fairly little background experience or knowledge, however troubleshooting is a little harder due to the simplified interface.
My initial thoughts were the mask angle (as the CP is located behind 2 storey tin sheds), which I changed from 15 degrees to 35 degrees and had a bit of a test - no change. Also, as there are several SmartNet licenses to choose from, I’ve made sure that I’m using one which isn’t already in use. Corrections are definitely coming in and, as previously described, I have successfully verified the CP with 3 other RS+ and a Leica GX1230+. I’ve finally tried reflashing the Reach and performing a ‘factory reset’ which obviously doesn’t change the wireless settings, but I don’t think that’s the problem here. Obviously there was no change after this.
On closer analysis of the data that was collected in RTKLIB, the satellites are there and being recognised and there are 5 that are in ‘fix’ with a good SNR and no cycle slips however the height value just doesn’t match up unlike the other systems which give me SDs of less than 1cm and differences between the CP and the observed position of less than 4cm.
Log files to come!