My hexacopter with ArduCopter 4.0.3, has servo controlled landing gear.
I’ve configured a Servo PWM and RC Aux switch to 29.
This works fine for manual retract and deploy.
But when I boot the drone, with gear deployed, Mission Planner will say: Landing Gear: Retract, but nothing happens. Then when I enter Land Mode the gear will retract from deployed state.
So it seems something is reversed?
How do I disable Gear interaction when using Land Mode?
Hi,
If using Mission Planner just go into advanced settings and search for channel 29 (RC29). Then change to reverse. Or you can go directly into the settings file (using a text editor like “Notepad” on Windows or “Kate” in some Linux distros) and look for RC29. There will be a line saying " RC29_REVERSED,0" change the 0 to a 1 and save file. – Do not do this whilst a groundstation is running ( APM Planner, QGroundControl, Mission Planner).
Also in those settings you can disable landing gear control, both using a groundstation software or directly in the settings file.
See also Landing Gear/ Retractable Camera Mount — Copter documentation
and perhaps archieved version Archived: Landing Gear — Copter documentation
In Mission Planner under the Config Screen --> Extended Tuning page select a channel you have available on your RC receiver and assign this as “Landing Gear”. Then you will have also access to a channel number which you can reverse.
Update: I’m running same version Arducopter as you do. But checked in QGroundControl and found in there you can easily assign any channel from 6 to 16 as landing gear. - This is helpful if you don’t have a lower channel number available.
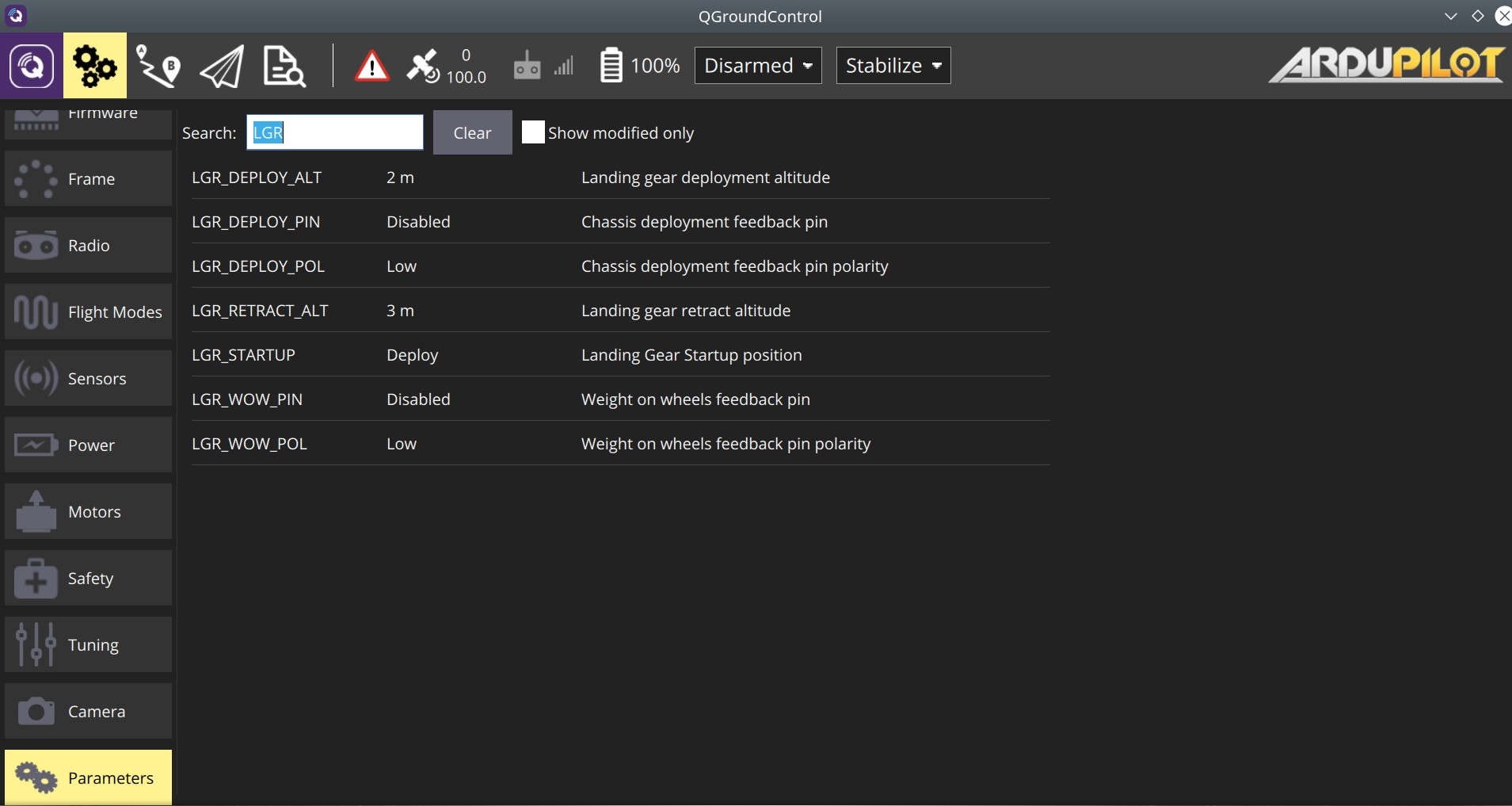
Using QGroundControl in Parameters it has a search field at the top. Just enter LGR and it will show all relevant settings in regards to landing gear.