I am on ArduCopter V4.0.3, using a Raspi5 and NAVIO2.
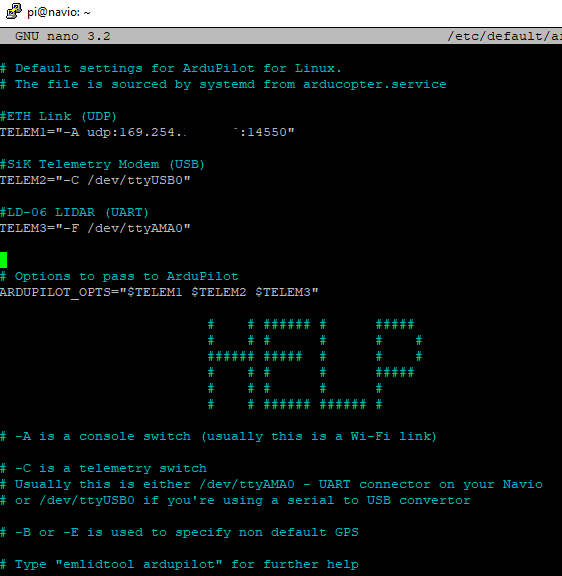
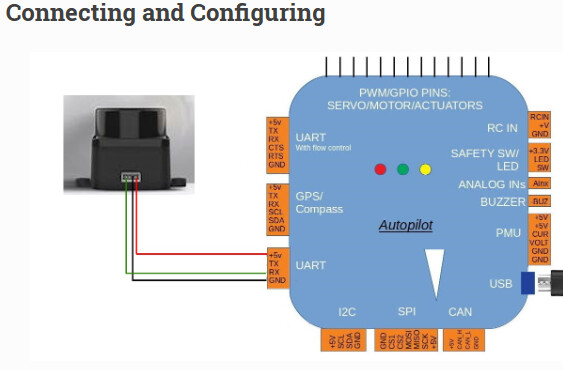
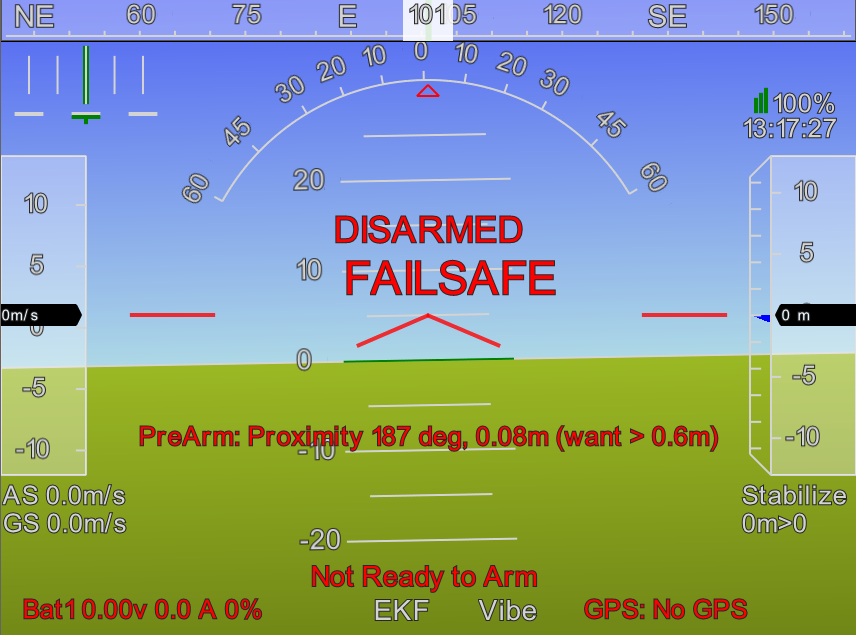
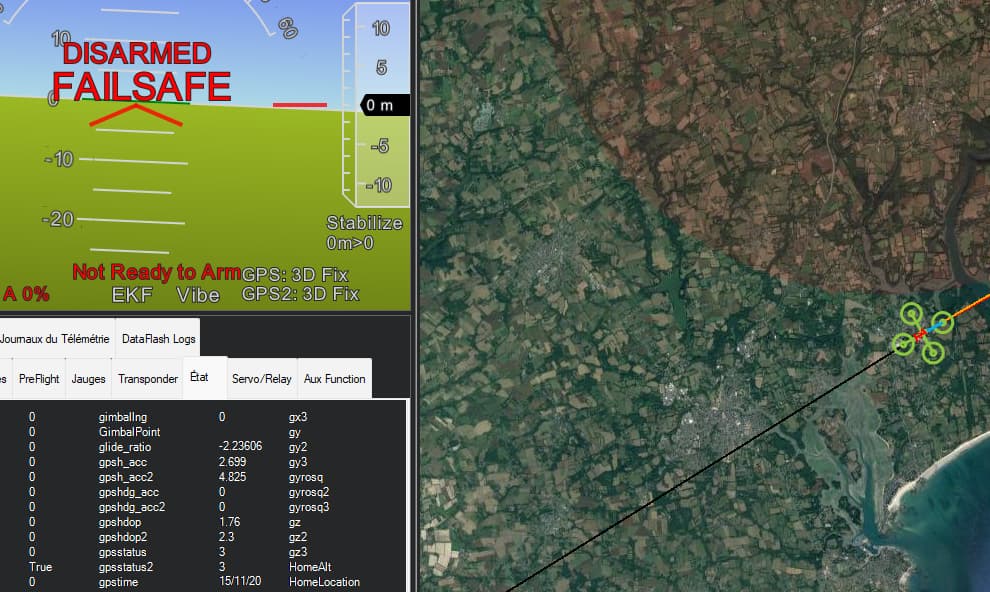
I have followed all the setup parameters listed under the LD-06 LIDAR and am a little stumped on what I should try. On the NAVIO2 I am able to check that data is reaching the UART port (albeit still in hex format). But I am getting nothing on Mission Planner, any tips where to start?
Hi Merryna! I learned that the reason my LIDAR wouldn’t work was because the drivers supporting it were available in a newer Ardu version. Now that I’ve upgraded to V4.5.7 it is now functional!
So is the only solution to go back to the previous copter firmaware version? I am trying to utilize the LD-06 Lidar which I believe was only implemented 2-3 versions ago.