



Just wandering if RV3 has any COGO functions yet. I’d like to maybe invest in the LoRa for my two M2’s, but I don’t know… I use my two M2’s as a static baseline when I’m using my Javad Victor LS as RTN. This gives me a closed loop with the M2’s as I always also store static for the RTN receiver. I then can PP and verify any questionable RTN positions or if I lose cell coverage while collecting data.
As Javad J-Field (controller software) has all COGO functions and more, I like to know if any COGO functions will be implemented in RV3. Below is an example in the lower left “white box” of javad’s J-Field showing “distance to last” to the last point collected.
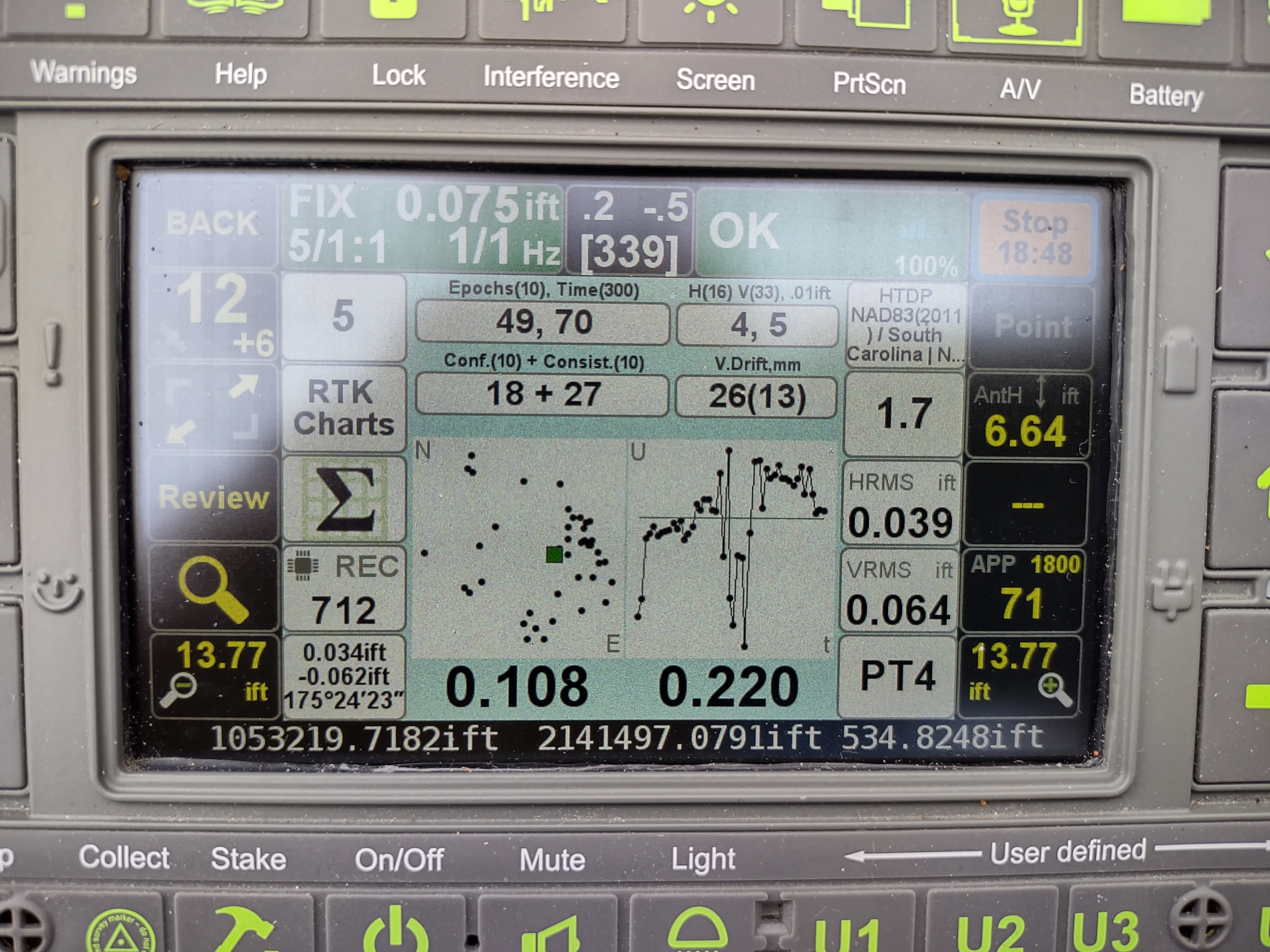
This is a valuable function in RTK/RTN. It really gives confidence to the user for the position collected. I had already collected a position (point 4) and was re-observing the point (point 5). Distance from point 5 to point 4 was 0.034’, vertical distance -0.062’ grid azimuth 175°24’23".
As our firm has all Javad gear, I think Emlid has a promising future with the system they have. As of now, I just don’t think Emlid is very friendly for the typical Land Surveyor until true COGO functions are implemented.
I like the simplicity of my M2’s for static, they are great receivers.