Hello – I am performing forest surveys requiring 1 m precision. I am attempting to use a Reach RS+ base/rover pair. I understand that these single-band receivers are not suitable for high-precision surveys in forests, but I am attempting to use them because I only need 1 m precision and I am comfortable with a float solution. I am always within 1 km of my base.
In my forest conditions, I usually have a float position with precision of ± 0.20 m or less (as displayed in the ReachView app status page). However, if I stand in one place, I often see my position (on the ReachView status page) drift considerably over several minutes, often by more than 5 meters. Why is there such a discrepancy between the displayed precision and the stability of my position? Is the precision that is displayed (±0.20 m) just a (very bad) estimate? Or is something else likely wrong that is causing my position to drift so much?
Relatedly, when I later return with the rover to my base station (within 3 m of the base), ReachView often tells me I am still very far from the base (sometimes by up to 80 m)!
Is it worth continuing to try using the RS+ base/rover pair in forest conditions given that I only need 1 m precision, or are these single-band receivers simply not suitable even for 1 m precision?
Part of why I was motivated to try using these units is that the Emlid Reach RS+ overview page says: " Reach RS+ is designed for harsh conditions. Dense forests, mountains, frost, heat and water, Reach can handle them all."
Would you mind specifying the firmware version of the units?
At the moment, I’m afraid it’s difficult to assume what could be the reason for such issues. To be able to determine it, I need to see the observational data and the solution files. So I’d ask you to share the following information with me:
raw data log, position log and base correction log from the rover
raw data log from the base
photos of the environment
These files would help us check the quality of the observational data, the solution status during the survey and if everything is received on the rover correctly. It’ll also help us see the environmental conditions of the survey.
Please note that for better accuracy, Reach RS+ receivers require a clear sky view. In somewhat difficult for a single-band receivers conditions, float solution can’t be reliable.
Thank you for pointing out that this might be misleading! We’ll make it clearer.
This description refers to the protection of the unit. So it explains that Reach RS+ is supplied with rigid housing, is water- and dustproof on IP67 standard, can be used in a wide range of operating temperatures which allows it to keep working in different environments.
Thanks @polina.buriak for the response. It is helpful to know that even a float solution is not reliable without a clear sky view. I’m still surprised that the displayed precision is so good, but perhaps this estimate is based on the assumption of a clear sky view.
The firmware version is 2.22.3. I will send you the photos and log separately.
May I ask you to update your receivers to the latest stable version v2.22.4 and check if you face the same issues? This firmware release should significantly improve the RTK performance of the units. You can update the units by pressing Check for updates button in the Settings tab of the ReachView app.
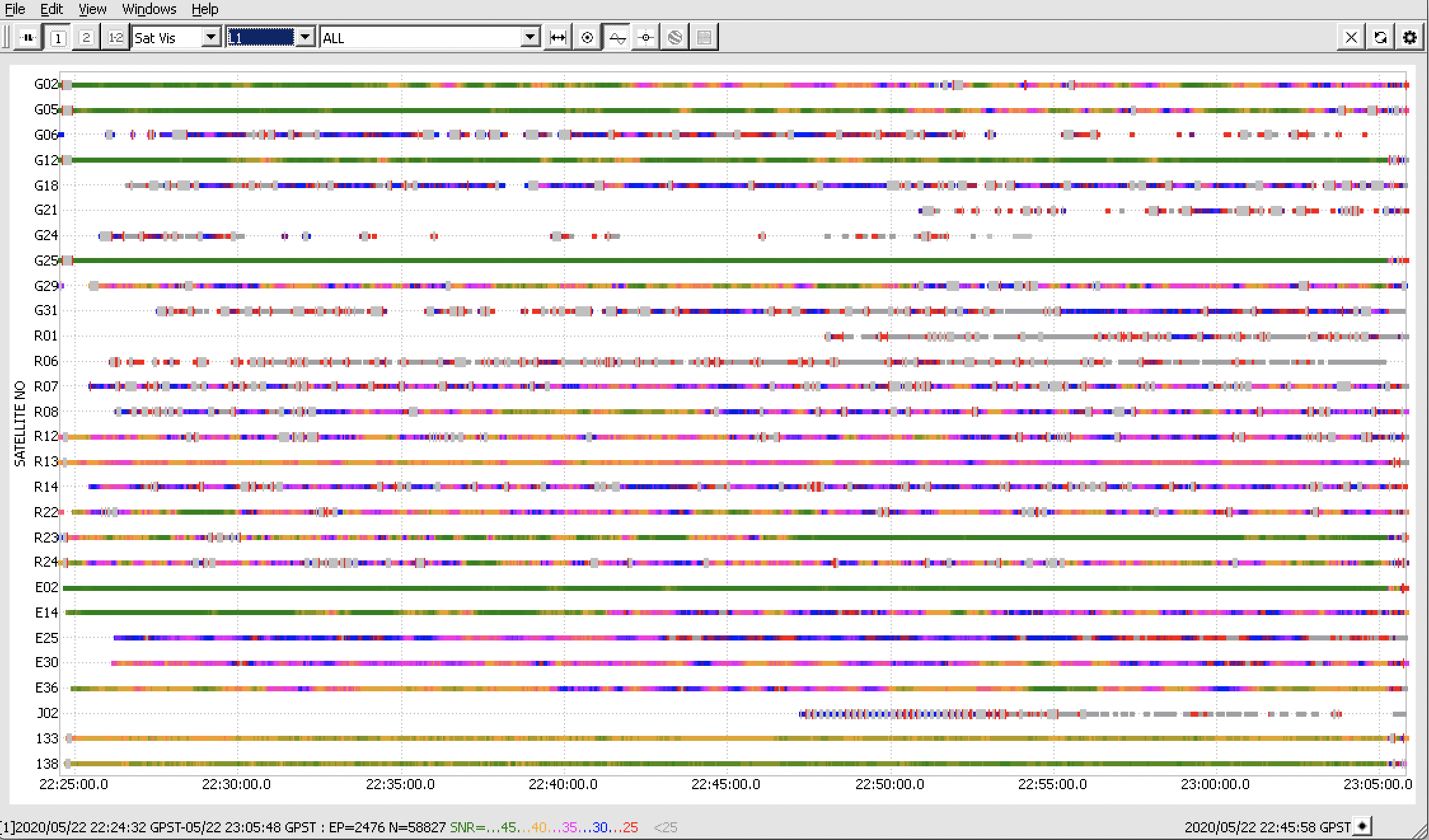
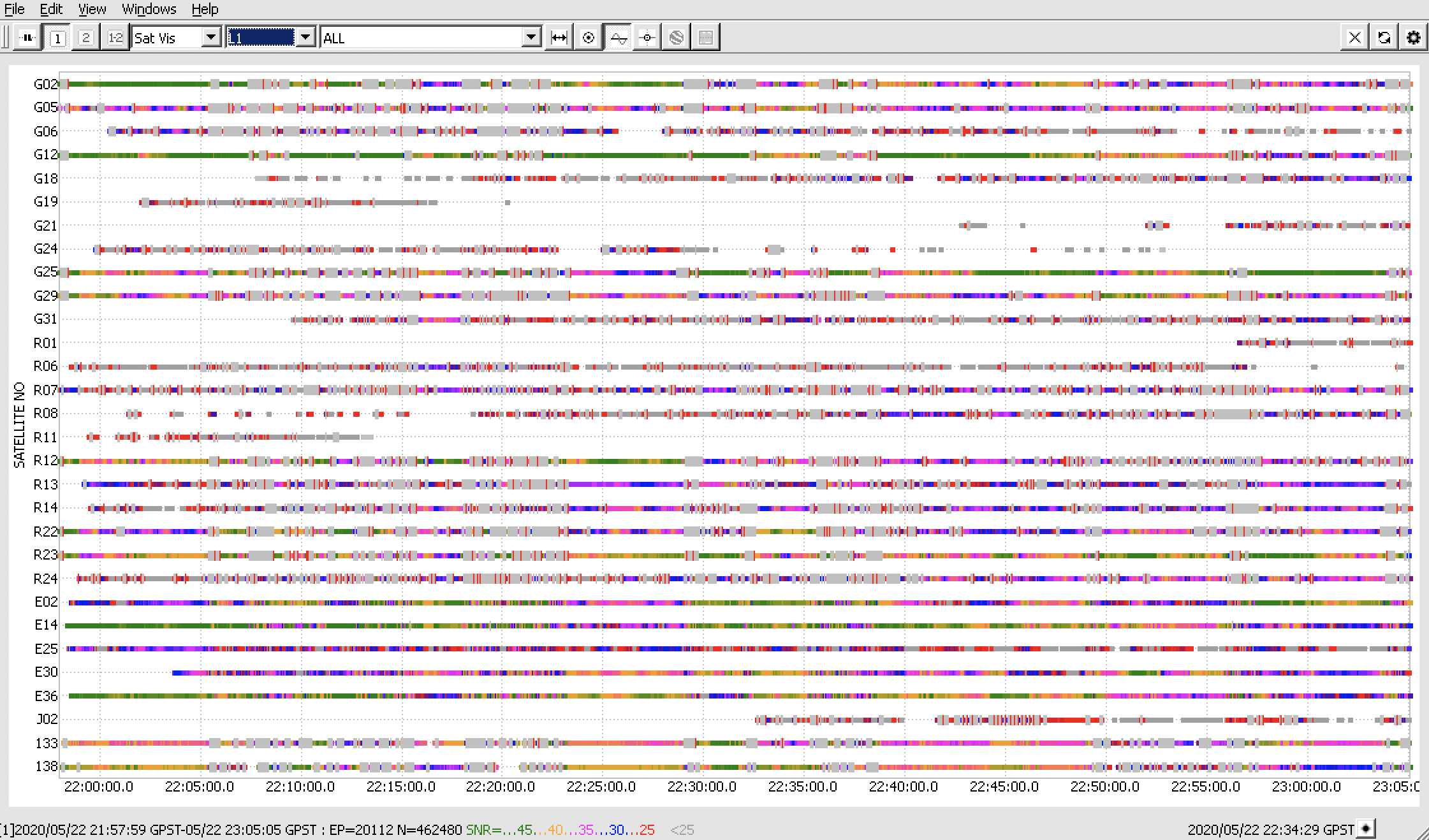
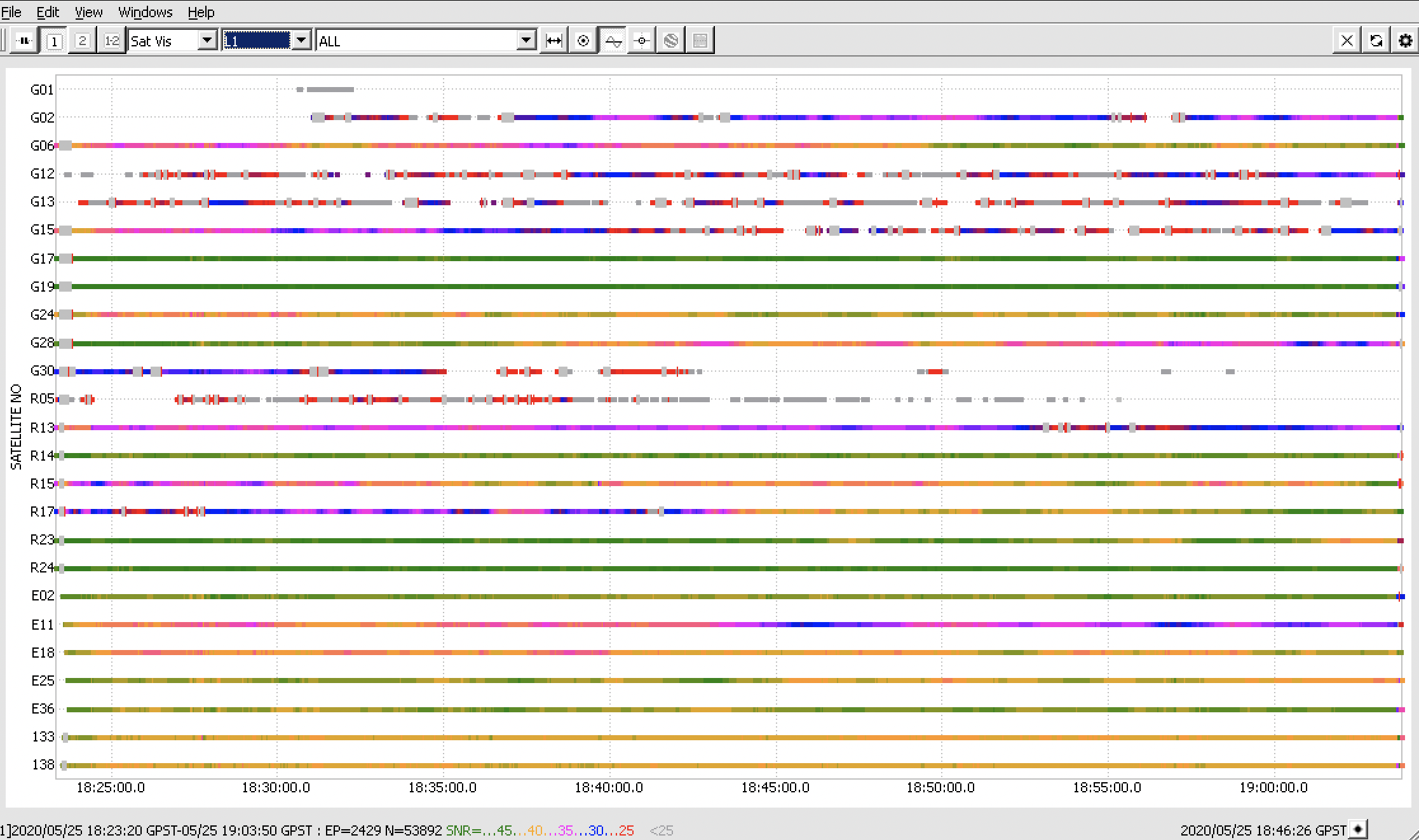
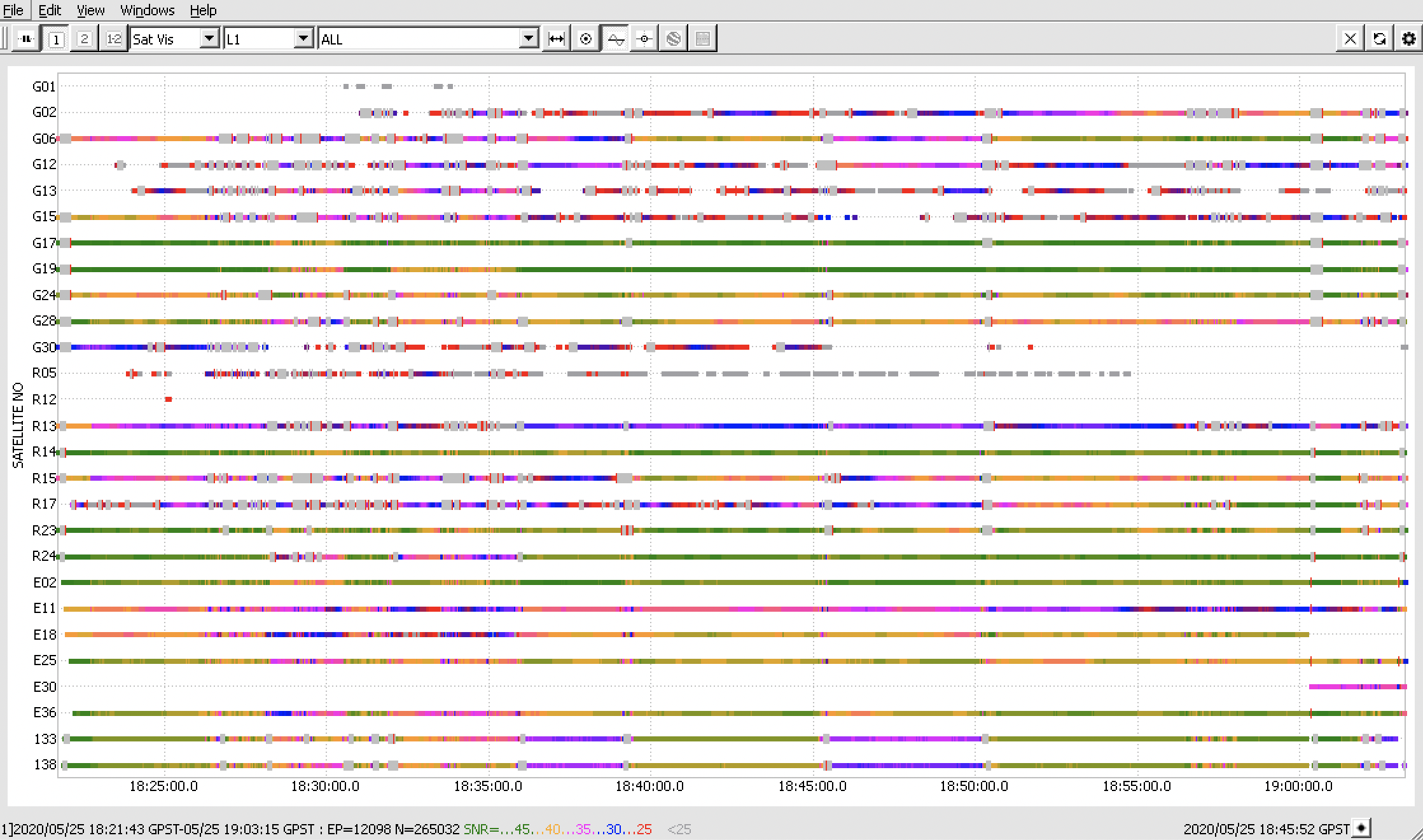
Also, please note that both receivers demonstrate rather poor observational quality:
It’s possible to see that the SNR values rarely exceed 40. The logs are also full of cycle slips. This mainly happens because the environmental conditions of your surveys are quite difficult for a single-band receiver. It might be possible to slightly improve the observational quality by checking our Reach RS+ Placement guide and checking our section of improving the quality of observational data.
Hi Polina – thanks so much for taking the time to look at the logs. I have updated the firmware to 2.22.4 and repeated the test. The performance does seem somewhat improved (the errors are not as large), but I am still experiencing the issues I originally described. When I am under moderate tree cover with the rover, I’ll sometimes see my position (float solution) jump by 20 m and then stay in the new location. If I move around, the rover appears to accurately track local relative movement, but the absolute position remains off. These jumps happen about every minute. If I then return with the rover to the base, the rover will still say it is up to 20 m from the base (this is better than the 80 m I experienced before). Over several minutes, it will slowly drift back to the correct location (adjacent to the base) and then acquire a fix solution. Does this sound like the sort of performance you would expect under moderate tree cover for these single-band receivers, or do you think something might be wrong with the units? Unfortunately the accuracy is not sufficient for my needs.
I had hoped it would be acceptable to use the RS+ with a float solution, especially since the unit displays precision as ± 0.20 m (approximately) with a float solution. But it sounds like you are saying the precision displayed by the unit should not be trusted when the unit has a float solution. Is this correct?
Reach RS+ normally shows correct accuracy estimation. And you should be able to gain the sub-meter accuracy with a float solution status.
However, dense vegetation is indeed harsh conditions for a single-frequency receiver. So, RMS value might jump due to cycle slips and unstable SNR value, as Polina said above. If you want to get reliable results, I’d advise against points collection with float solution in the forest.
I guess it’s related to the challenging conditions as well. If the unit showed the wrong baseline, even with a fixed solution, it would be weird. However, the behavior you experience is usual for such conditions.
Hi djyoung ! Why not PP ? Depending on your baseline lengths and time on station with the rover, you could probably get the accuracy you need (< 1 meter). Even with single freq receivers back in the old days (90’s), I could get approx. 1 meter accuracy locating creeks for boundary surveys. You’d probably have to do some tests to define the actual observation time for the rover. I would also try and keep the baselines as short as possible. Also as polina and svetlana suggested, I would place the base station in as clear an area as possible.
Thanks for that suggestions Bryan! I’ll admit I’m pretty new to RTK/PPK; I didn’t realize that PPK could achieve higher accuracy than RTK on the same units. If the required observation time is more than a minute, it might not be practical, but it definitely sounds worth exploring! Thanks again.
You’ll probably need more than a minute, I’d test for the actual time needed for the rover. Maybe 1, 2 , 3 possibly 5 just to see the accuracy. I don’t know what kind of woods they are. Around here, if you get in a pine forest, it’ll play havoc with the signals.