Insert I am new here excuse, well, because I am brand new to this service
I am about to do my first drone mapping job tomorrow and thought I had all this dialed in. I went out to a local park to set all my gear up and make sure today and realized I have a problem.
I am using a Reach RS2+ as my base station (no SIM card, using jetpack hotspot) and am using a Reach RX as my rover to set GCP’s, then will connect a Mavic 3M with RTK to the Reach RS2+ base station.
The site I’m going to tomorrow will probably have poor internet connection, but may have just enough. The way I’d prefer to do this is to use the Average FIX with an NTRIP Correction Input on the base station. I’ll then connect the Reach RX to the base as a rover to gather the GCP’s, then connect the drone as a rover, then fly the drone. If this all doesn’t work, I’ll fall back and use a Average SINGLE, but I’d much rather have the increased accuracy of getting a FIX.
Whenever I select the “Correction Input” tab under my Reach RS2+ tabs in the Emlid Flow app, I select NTRIP, put in the Address as either the IP address, or using “caster.emlid.com” (tried both options), listed the Port as “2101”, my Mount Point as “MP15372” which I got from logging into caster.emlid.com. It then asks for my username and password. WHERE DO I GET THESE?
I have tried using my email and password that I use to login to caster.emlid.com and it doesn’t work. I know this is super simple, I’ve looked through MANY videos from Emlid, from other people who use Emlid, I’ve read through tutorials, searched the forum and can’t seem to find this one small bit of info. Usually the guides just gloss over it by saying something to the extent of just log into the NTRIP.
So in setting up the Reach RS2+ (as a base station) to the NTRIP caster.emlid.com network, I’m to set it up as a Rover? And then will connect the Reach RX also as a Rover using the same username and password? Or…Do I set the Reach RX up with a local NTRIP?
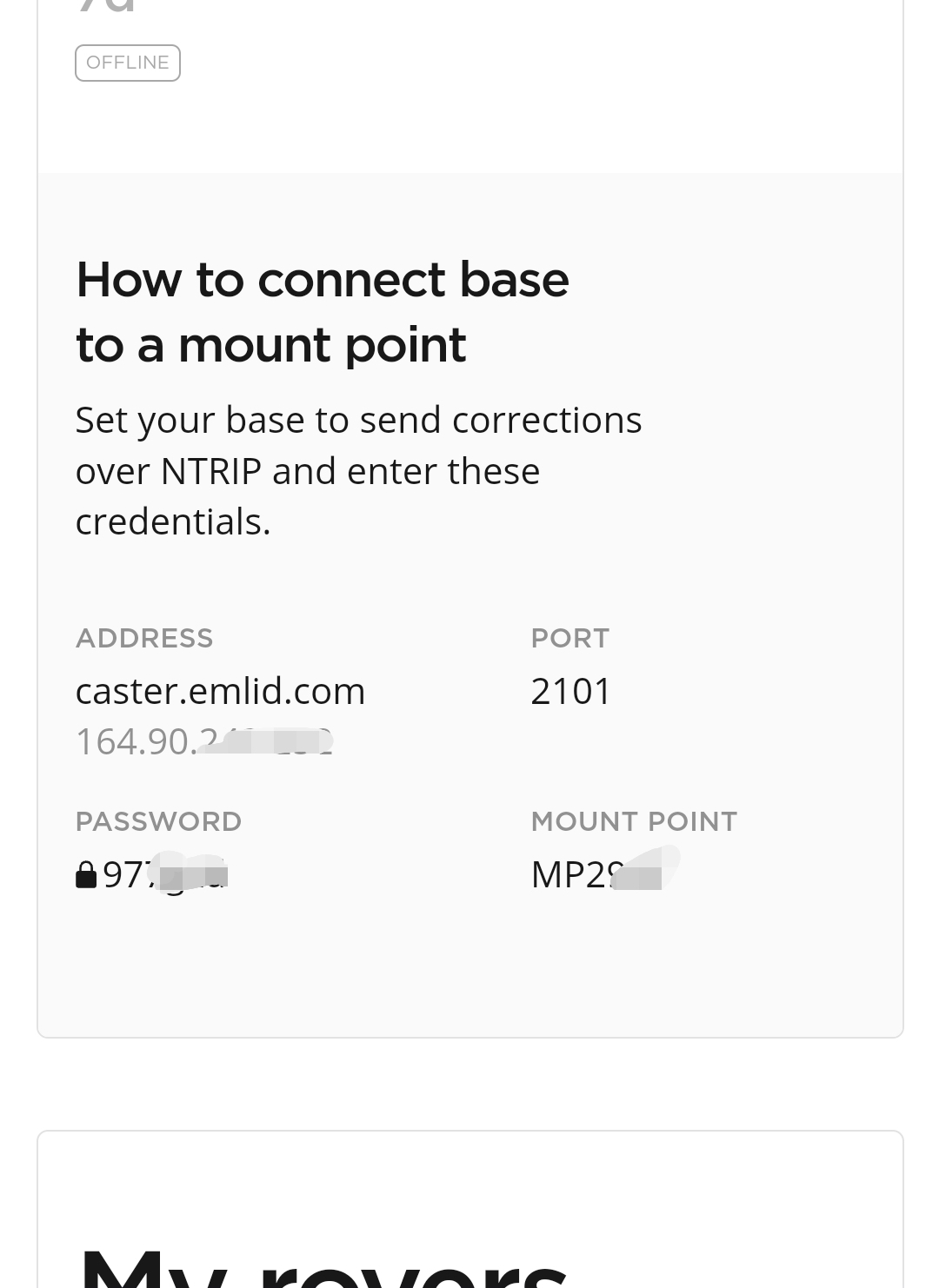
For the Base it’s the other section above, use the My Mount Points under How to connect base to a mount point.
Note the Base & Rover have different passwords listed in each section.
So if I’m going to use the Reach RS2+ as a base and get an Average SINGLE location, I would use the “My mount points” above that does not have a username and password.
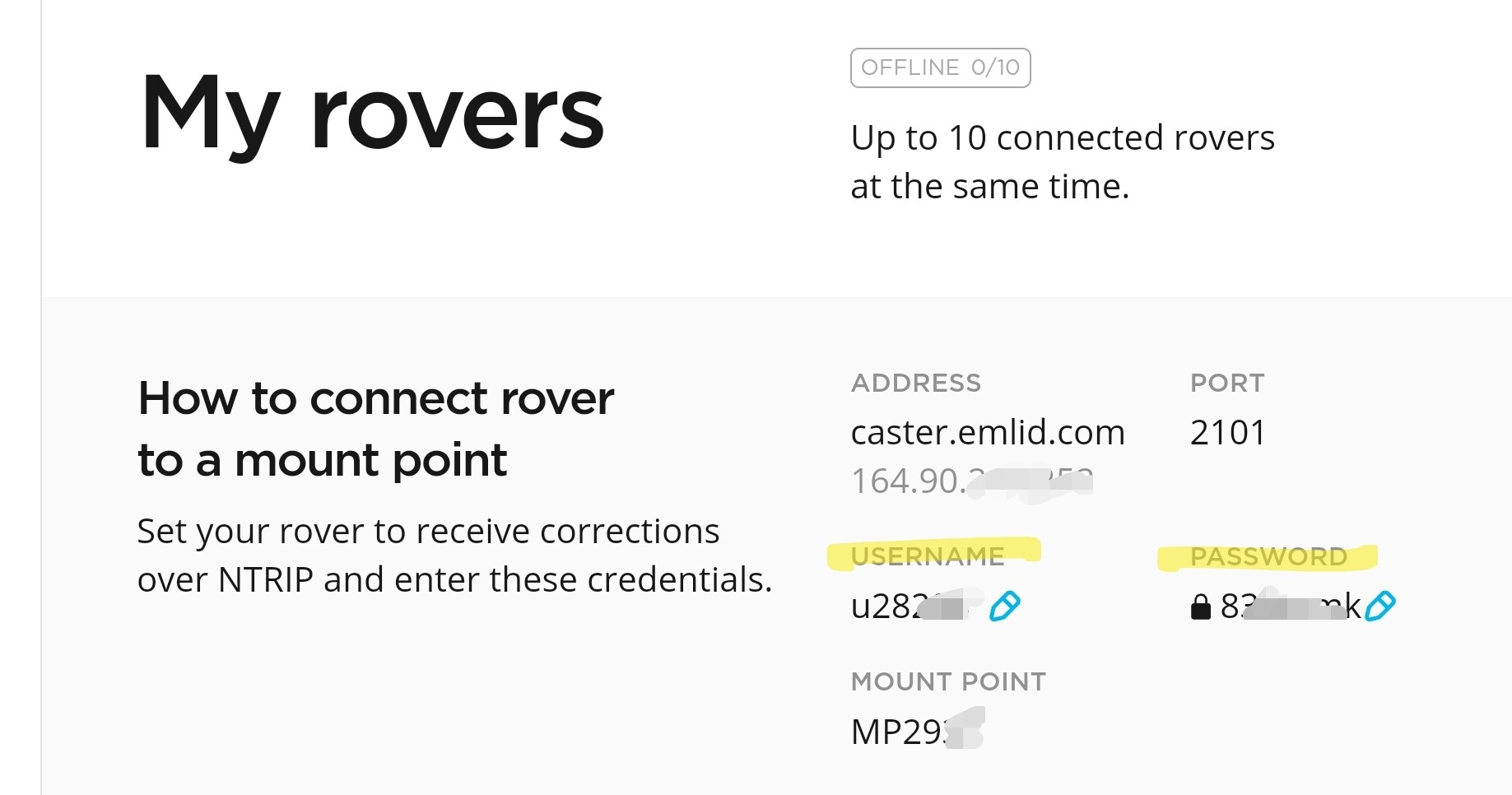
But if I’m going to use the Reach RS2+ to connect to caster.emlid.com as NTRIP, then the caster site is the base, so I instead sign in with my RS2+ as a rover?
Then how would I connect the Reach RX to the Reach RS2+ for gathering GCP’s? Or do I instead just connect the Reach RX to the caster.emlid.com NTRIP server too?
Well, I have the Reach RS2+ outside my home right now on a tripod and have had it logging for a while. I changed the Correction Input with the Rover username and password. I see “1/10” show up on the website under “My rovers” so I know I got that right. The Reach RS2+ is currently connected to my home wifi with good signal.
I’m still seeing “Waiting for corrections…”
I’ve tried Average FIX, Average FLOAT and both have the same results. I’ve turned it off, and back on. I’ve reconnected it to the wifi, nothing seems to be changing. I can’t seem to get the corrections loaded in.
I think timd1971 is on the right track as I’m sensing some disconnects here.
If you are using Emlid Caster, think of it as simply a relay service. First you have to feed it base corrections, and only then it will relay them out for you to any rovers that connect.
So as per the last example, your RS2+ is not receiving any corrections in - even though it’s connected as a rover - simply because you are not feeding any corrections to the Emlid Caster in the first place for it to send back out. So the RS2+ is just patiently waiting for you to do something else and something to eventually turn up. E.g. it’s a like a bank, you can’t take out what you haven’t put in. Well you could, but it’s not going to end well either.
Likewise, you can’t use the RS2+ as a base to send corrections to the Emlid Caster Mount Point, and at the same time connect the RS2+ as a Rover to receive the back the same corrections that aren’t really corrections. Discovering perpetual motion would be great, but in reality it would be like a dog starting to eat it’s own tail, if it doesn’t stop it’s going to get ugly very quickly.
If I’m misinterpreting the scenarios above please accept my apologies to both yourself and the dog.
The most important thing up front is to first decide the known reference point that all your differentials will be based on. Two different & basic options based on your comments above would be OK but they are different approaches:
Yes, you could do it by using the Average Fix you mentioned, this is all good, but you will need to use a seperate external CORS NTRIP correction into the RS2+ Base. Guide here: Averaging base position in FIX | Reach RS2/RS2+ (emlid.com)
And if you wanted to do it with the Average Single you mentioned, that’s also OK. In this case you won’t need the external CORS NTRIP (or any internet), but later you will require the CORS observation files to post-process your Averaged Single base position to a Fixed solution in Emlid Studio, and then subsequently apply the resultant shift to your RTK data from the Rover and Drone that were using the RS2+ as Base.
Guide here: How to correct collected points with a new base position? - Support tips - Emlid Community Forum
Well like I said when I started this topic, I’m brand new to this so thank you for bearing with me. My confusion centered around thinking the caster network was a source for NTRIP corrections (like a CORS network). So I was very confused when I was connected to it but not receiving corrections.
Now I understand that it is a way to connect my base unit and rover unit(s) to each other via the internet.
Hi, it looks like you would have access to California’s statewide RTN service with a $100.00 registration fee and application. https://sopac-csrc.ucsd.edu/index.php/crtn-consortium/ Public Service: Member fees support free and open access to basic services for all users in California.
This would help in receiving an Average Fix location for your Base unit and is also assuming you would have cell service for the Base receiver location.
I second @Wombo’s that Emlid Caster is just passing the data and not sending corrections. To get corrections, you will need an NTRIP service or download a CORS log for PPK processing.
Additionally for Emlid Caster, we have this guide on how to connect your base and rover.
@cmcarman15, welcome to the community! If anything comes up or you have any questions, please feel free to post a new thread or email us at support@emlid.com.