Hi, i have a problem with rtk… I have two device “base and rover” that comunication with rdf 866.
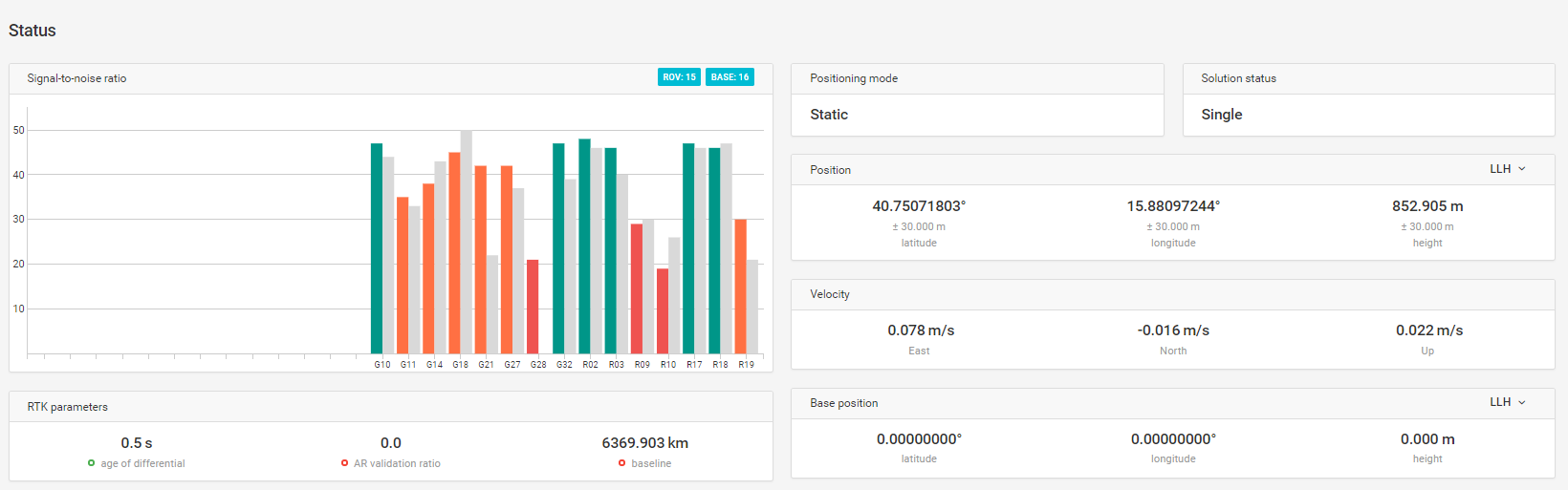
but when i look the signal, the grey bar “base signal” disappears very quickly, the age age of differential is very low 8 second…
Why? we have a solution for this?
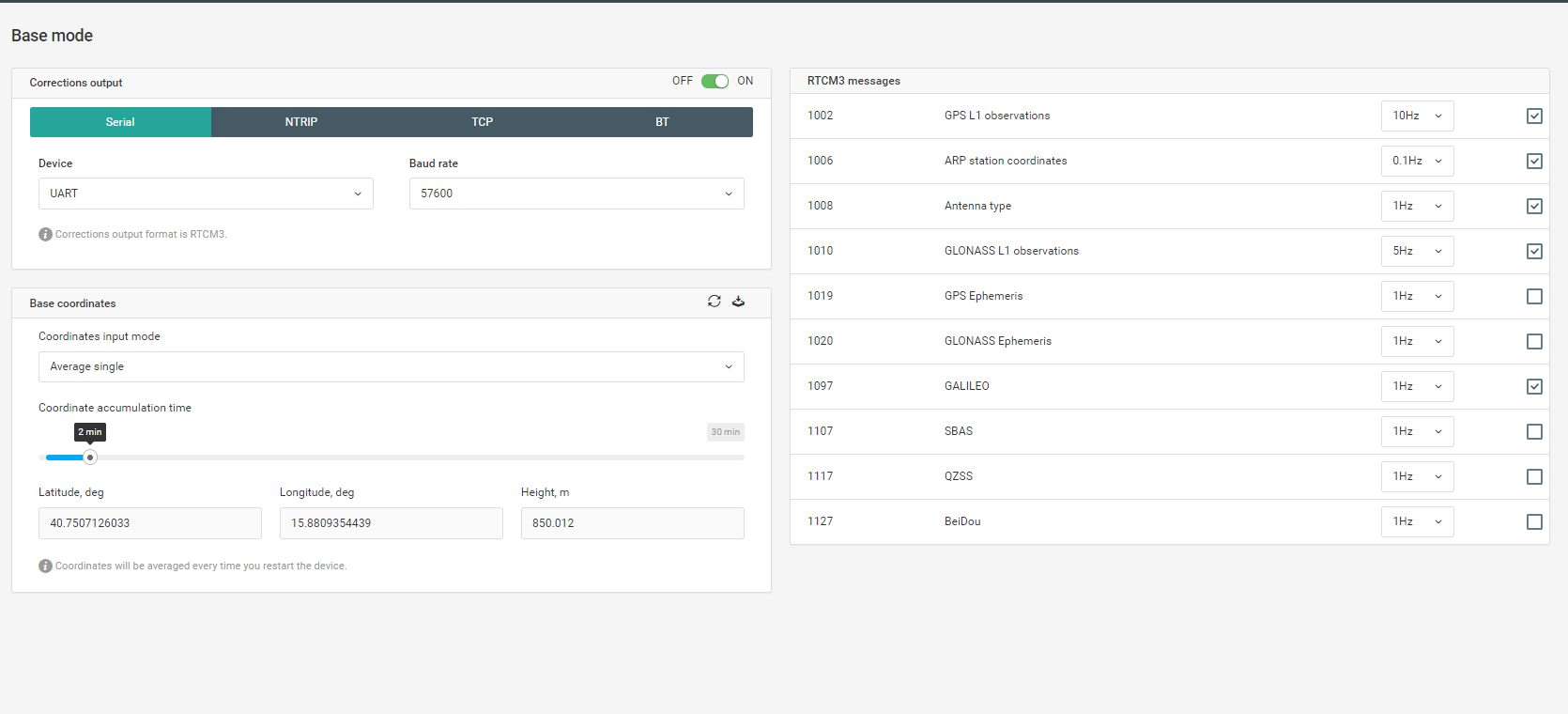
Just as @bide mentioned, you must have configured Reach to send too much data for the radios to handle. Try keeping base mode’s messages to a required minimum, say 1002 and 1006 for testing the correction link first.
I don’t understand, when the age of differential is low the rtk correction doesn’t work, because the position updates continuously without having the fix…
I don’t understand…
sorry and thanks for the help
The ideal situation would be age of differential = 0. Realistic values are 1, 2 seconds normally or maybe 4 seconds if you have the message frequency slowed down.
It should be faster to get fix status when your age of differential is a low number.
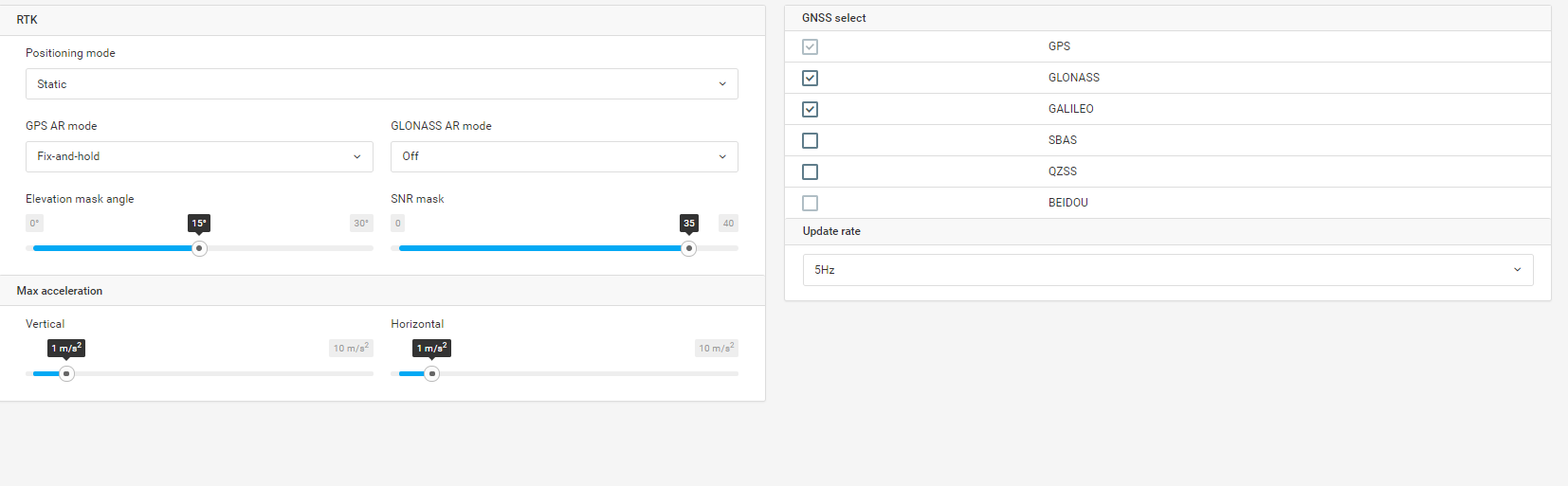
Maybe it would help if you posted some pictures of your settings.
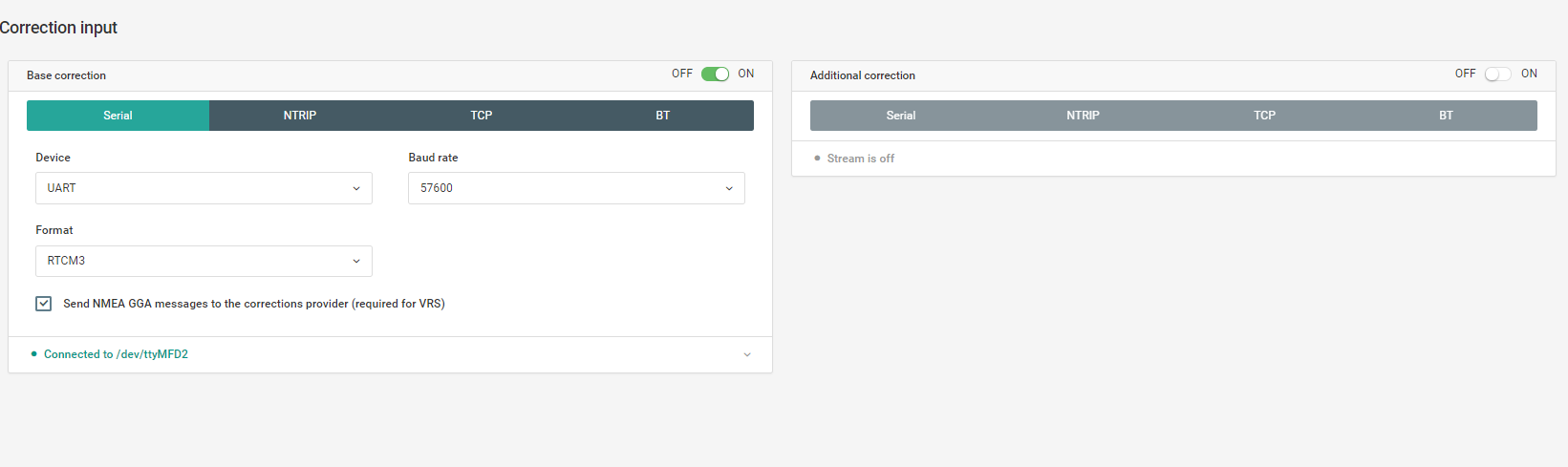
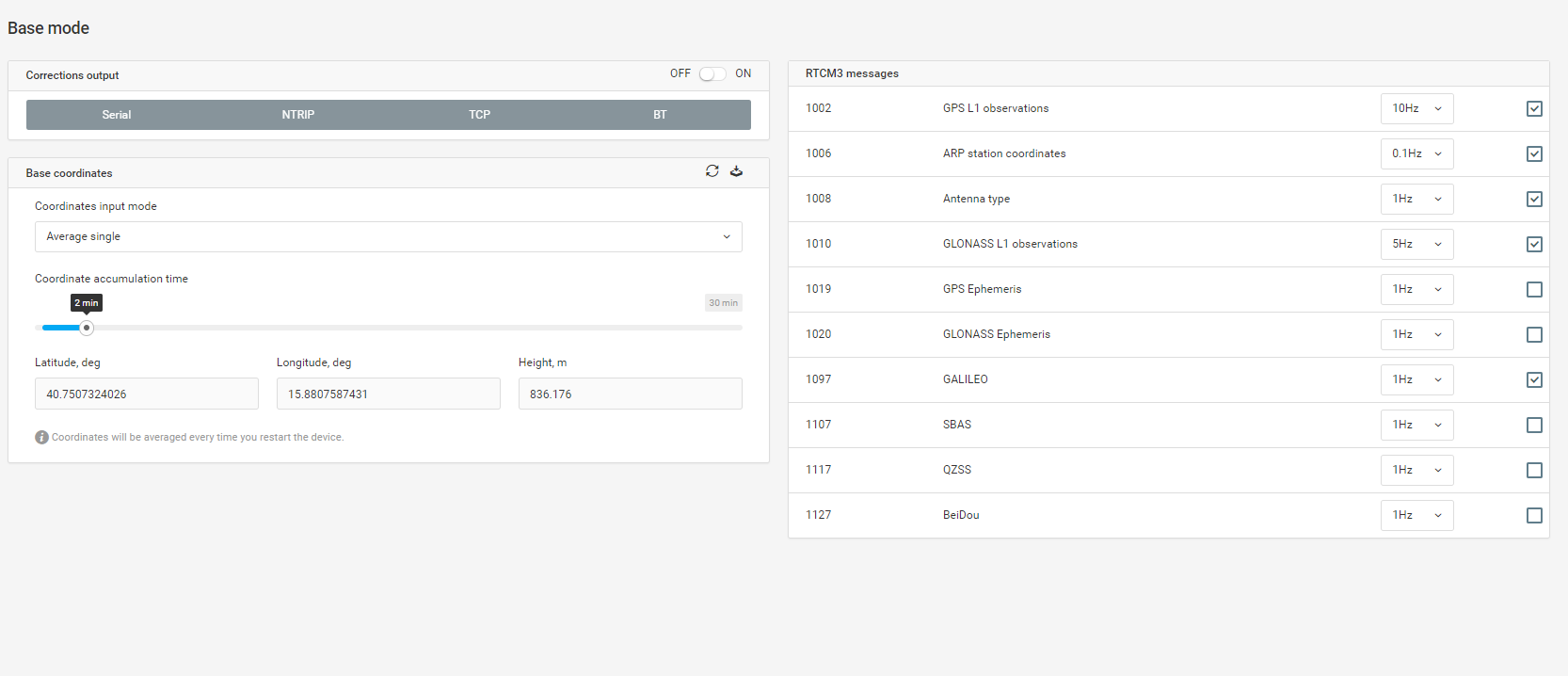
Thank you for posting the pictures of your settings. The problem appears to be in the base settings; RTCM3 messages:
1002; GPS L1 observations
10Hz --> change to 1Hz
1010; Glonass L1 ovservations
5Hz --> change to 1Hz
Now check your rover and see that the grey bars of the base are steady and consistent.
If you must have faster corrections, then try increasing the setting one at a time until you notice age of differential increasing beyond 4 seconds or so. Then go back to the previous slower setting.
Weather may have somewhat an impact, but it depends how poor the signals where in the beginning. Also atmospheric conditions could degrade signals as well. But to be sure, you need to analyse and postprocess log files to get a better picture.
But it should not be any probleme doing survey in rain if thats your question