



First of all, I’m new here, and I’m not a professional surveyor, just a hobbiest.
I just learn a few days ago how to post process the data from my 2 emlid reach, using one as Rover, second one as RTK. Im getting much better results than running them in RTK. Anyway, what I planing to do is to use this on a Quadcopter/FixWing, I don’t need RTK, just an accurate position from where/when the picture was taken. at the moment there are a few solutions in order to post process pictures from a fix wing if there is a camera trigger that we can connect to the emlid gpio. For the phantom4adv the solution from @Simon_Allen using a LDR is a very good one, but for other users that have a phantom3pro there is no way to get the camera shutter data, so here is what I would like to try. I would like to share the idea in order to see if this is something new / possible, and to be sure that is the right way to do it, or if there is any software/way of doing it.
Also if this works, I will be useful to save time in walking surveys.
If you use maps.me app, you need to specify the drone m/s speed, you can make it up to 15m/s, but still, if a slow speed of 1m/seg is set, and there is a .5sec error of when the picture was taken, picture position can be up to 50cm offset. So timing is they key.
If you use DJIPROgs app, the quadcopter stops before taking the picture, and as soon as the pictrue is taken, the quad moves fast to the next position. I did not mount the emld on my phantom yet, but I did the experiment on ground, and its easy to spot where the gps was near still.
The idea of my app is to provide the DJI directory of all the pictures that were taken when was flying + 2 ground pictures ( one before start, one after ). Also we need to provide the .pos file of the solution between the base + rover mounted on the phantom 3. The software will take all the points from the pos file, it will try to find all the points where the quad was almost still, it will average them, and provide x y z position of each time the quadcopter stoped ( this need to be researched, it wont the be just the average, most likely it will be the last point from the “still” group ). After the solution is found, it will show a table of all the pictures x y z drone gps coordinates, and a new table of the new post proceeded cordinates, and it will overwrite the exif data or the pictures ( or can be a ,csv export ) in order to make a friendly workflow to import the pictures into pix4d/agisoft.
Until now I was able to get the exif data of the pictures, and to remplace the old data with my new one.
I was able to render the .pos file in order to evaluate the correct group segmentation.
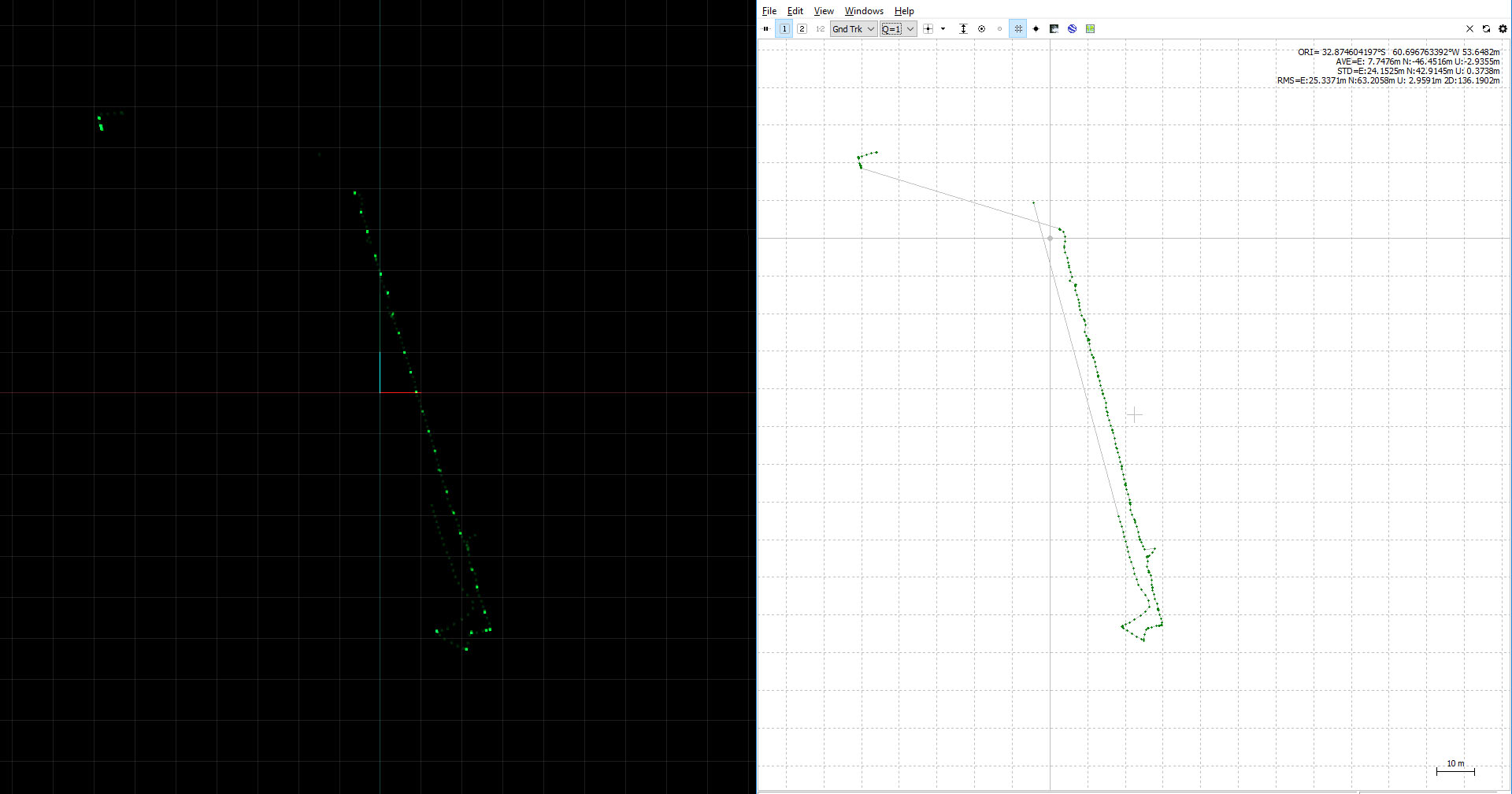
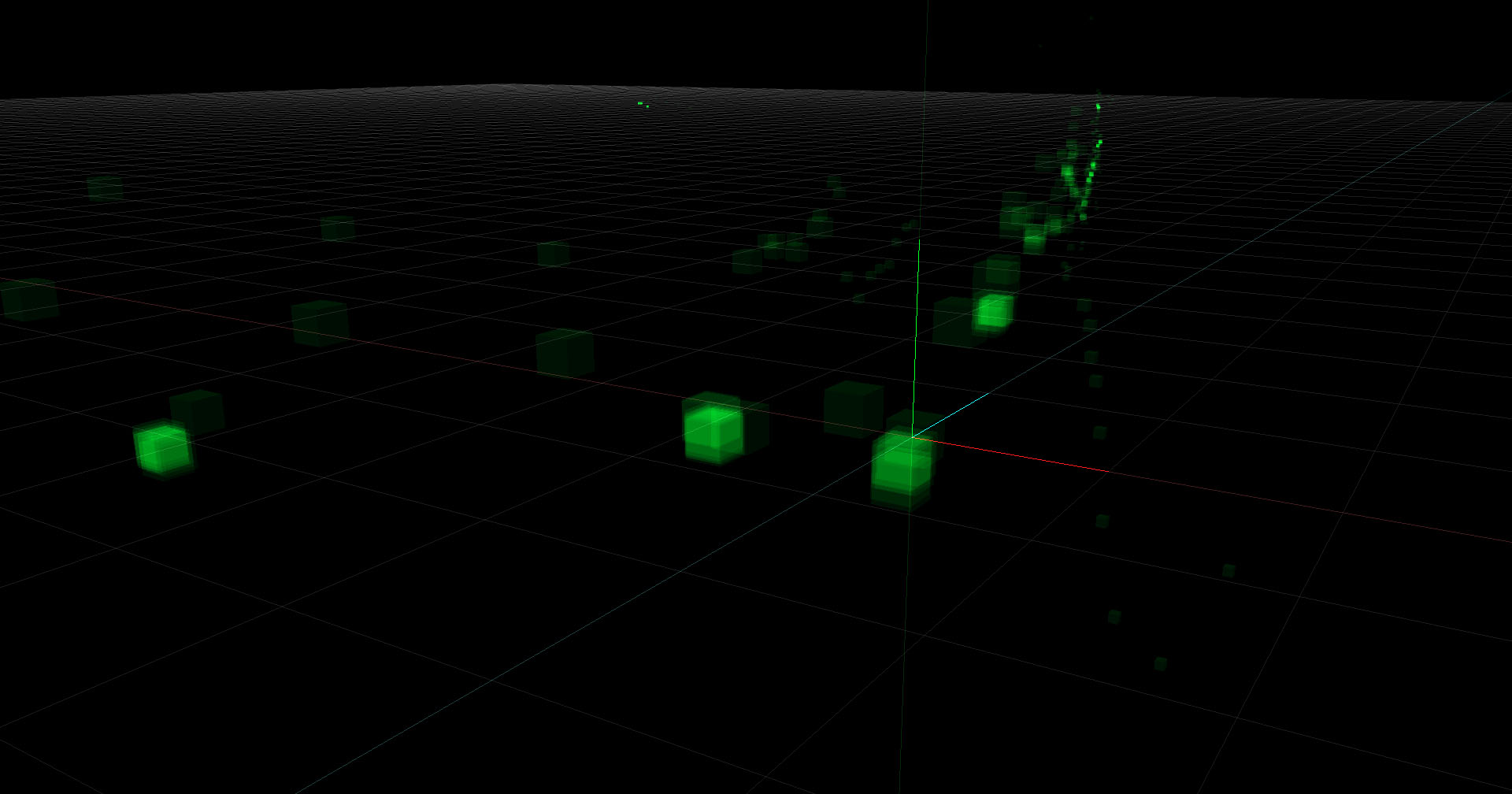
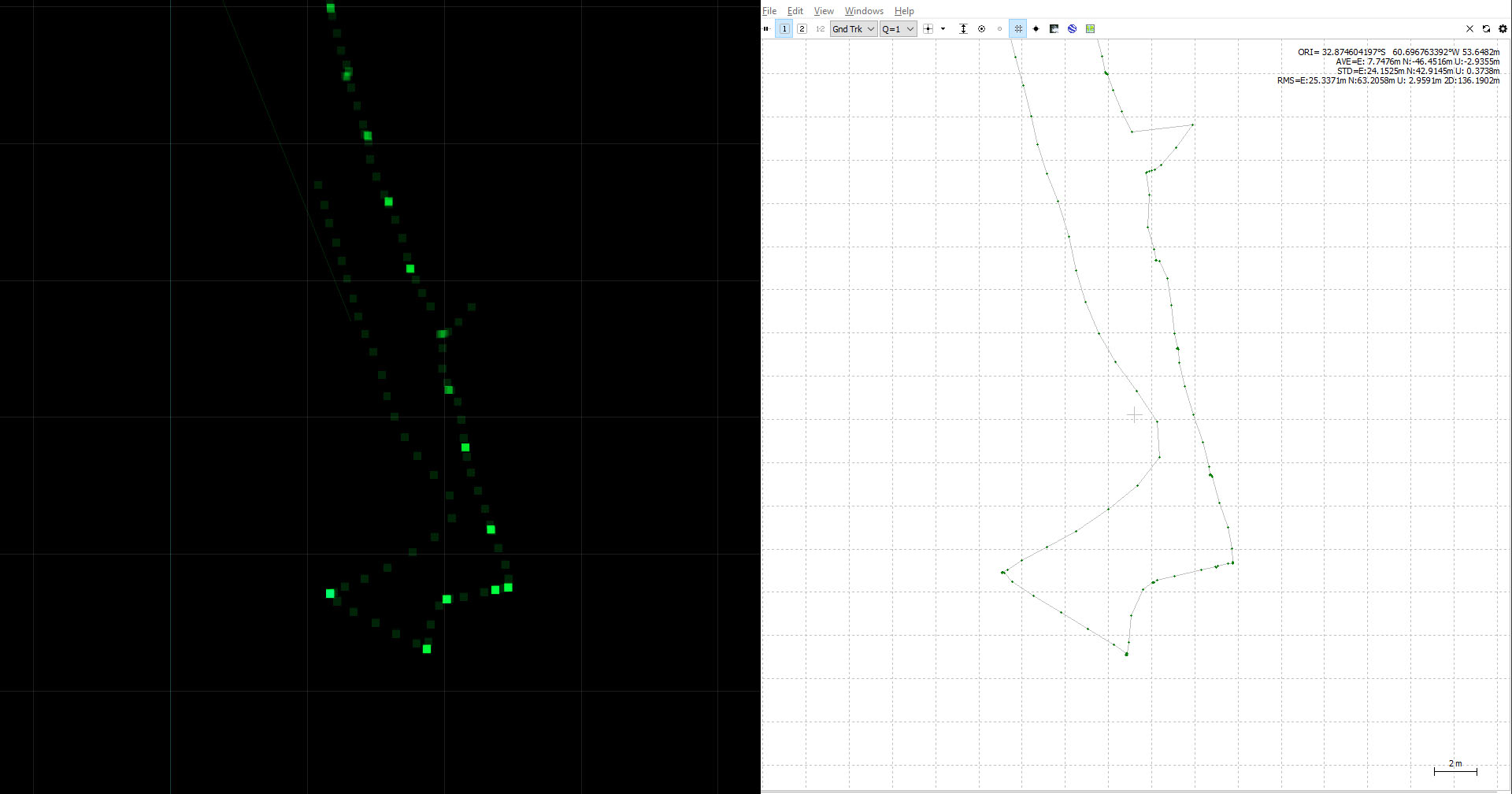
This is a walking survey where I stoped for 4 seconds on differnet spots simulating what the phantom will do
Again, maybe this already exist and I just wasting my time, please let me know what you guys think.