



Hello TB_RTK, Rick J, Bide, Luccatiel and all reach users,
Thank you for the comments. At the moment as I wrote before, we are without radio connection (which are connected to USB-OTG and they seem to be powered but I haven’ t found how to link them yet).
About the pos processing, I read the tutorial and all these previous comments: What Are RTK settings for Base and Rover when outputting to File for RTKPost - #16 by bide
From what I have read I see some recommendations>
- Base and rover should be in single mode.
- GPS and Glonass Sats with 5 Hz is recommended
- Record raw files (UBX) for both Receivers
- Record Base lat/lon/height and write it down to be used for post processing
Now in the post processing, I can pick any obs file to be used as rover or base as recommended by Bide Pro: [quote=“bide, post:2, topic:2658”]
When using RTKPost, just pick the .obs file that you want to use as the base and the other .obs file as the rover. The .*nav files can be picked from the unit that had the best sky view.
[/quote]
For this project I created a drive folder open to the public in which you can find:
-Raw data (ubx files for both receivers)
-Process images for each tab settings using the RTKpost. I did not include images of the RTKconv since it is straight forward process.
-Results images testing single, static and kinematic post processing modes
-Config files used for some of the tests
-Survey waypoints in shapefile collected using the survey tool with the rover receiver
Link to all above data is here: https://drive.google.com/drive/folders/0B_ehVYYUBf1PMU4wNVV3VlZpODA?usp=sharing
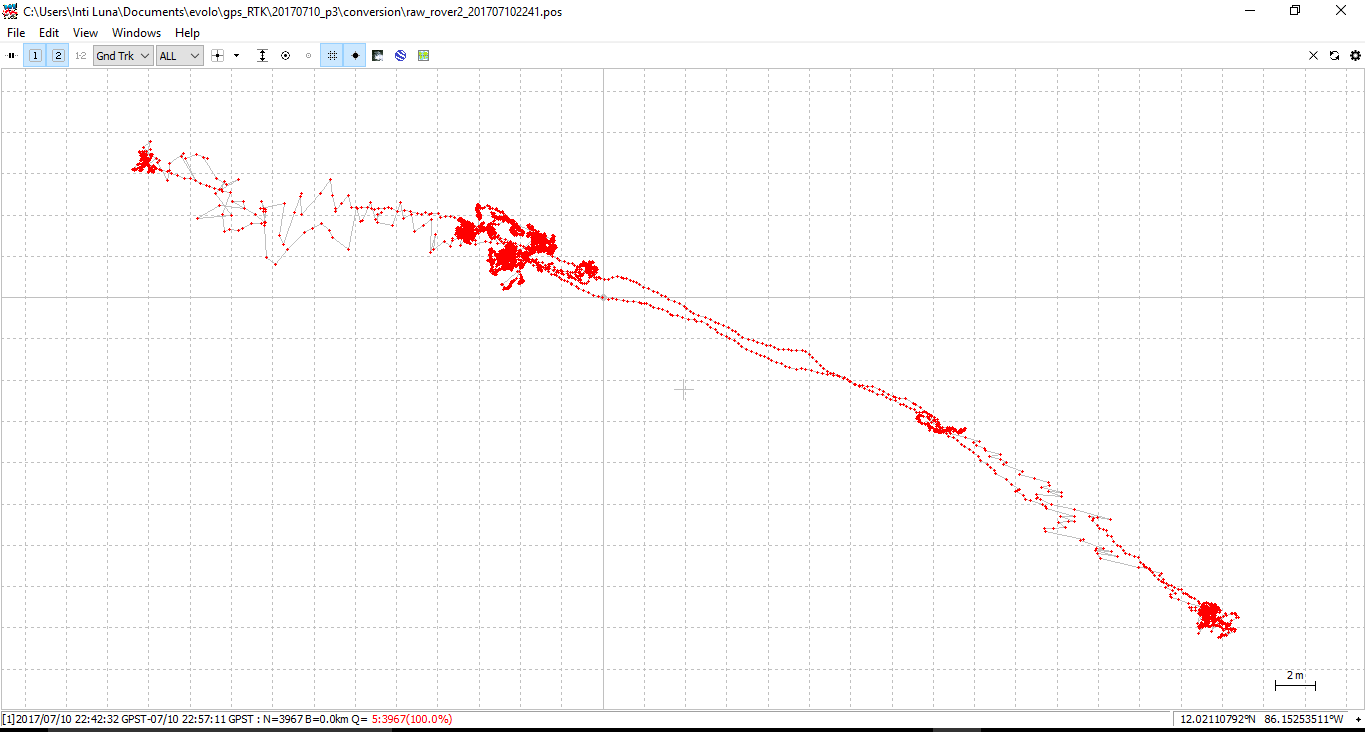
In general i got better results with kinematic configuration in the post processing.

compared to single mode in post processing as shown below:
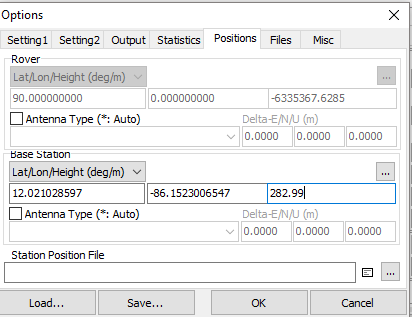
I entered base coordinates and heights manually (coordinates that I got using the receiver in single mode averaging for 2 minutes) in here:
I would like to get some guidance from Reach user with more experience and/or developer team to know:
- if I doing a proper post processing and please let us know recommendations on how to improve it.
- how to get the coordinates of the waypoints collected using the survey tool (corrected) after the post processing. Please notice that I already try to open with the RTKplot the pos.events and the plot only shows the reference point (base) but no other waypoints.
Thank you all for your help and time to explain simple things to a new reach user.