If Rover connected one ntrip server , it can save a Base correction log file in rtcm3 file format .
how to use it in post process ?
If Rover connected one ntrip server , it can save a Base correction log file in rtcm3 file format .
how to use it in post process ?
Use it like any other correction. Either as it is or convert to extract the content to analyze or for further processing.
By using base correction saved at rover end, you see what rover has received, and e.g find where you lost correction
@TB_RTK I met some problem.
I lost some trace point after correction.
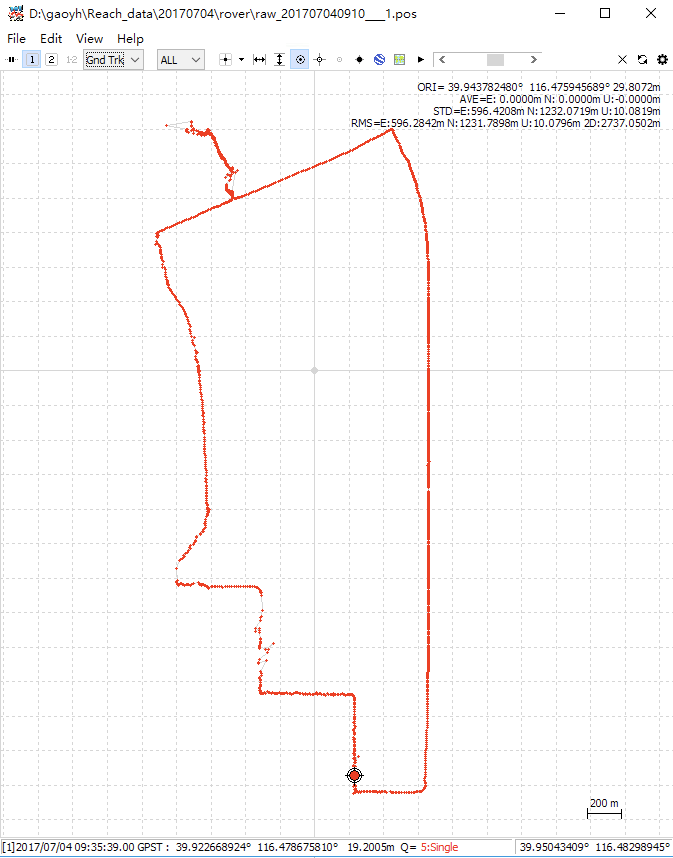
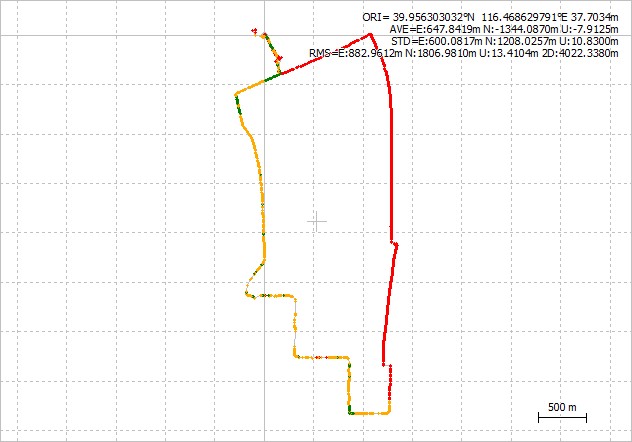
as below , pic1 is single solution
Reach RS Position log file has very big deviation at some time . the distance of deviation is about 75km.
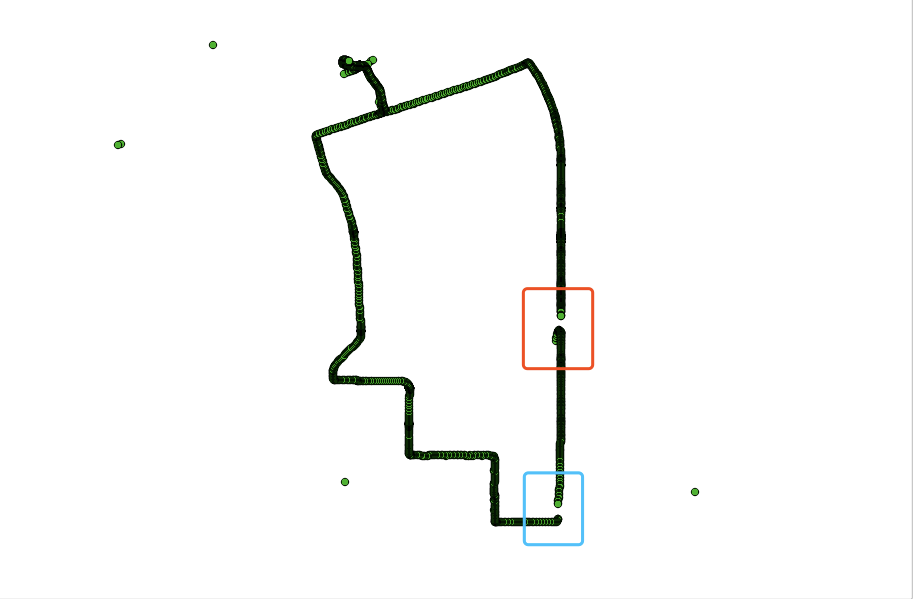
pic1 is the overview of all trace points in LLH file.
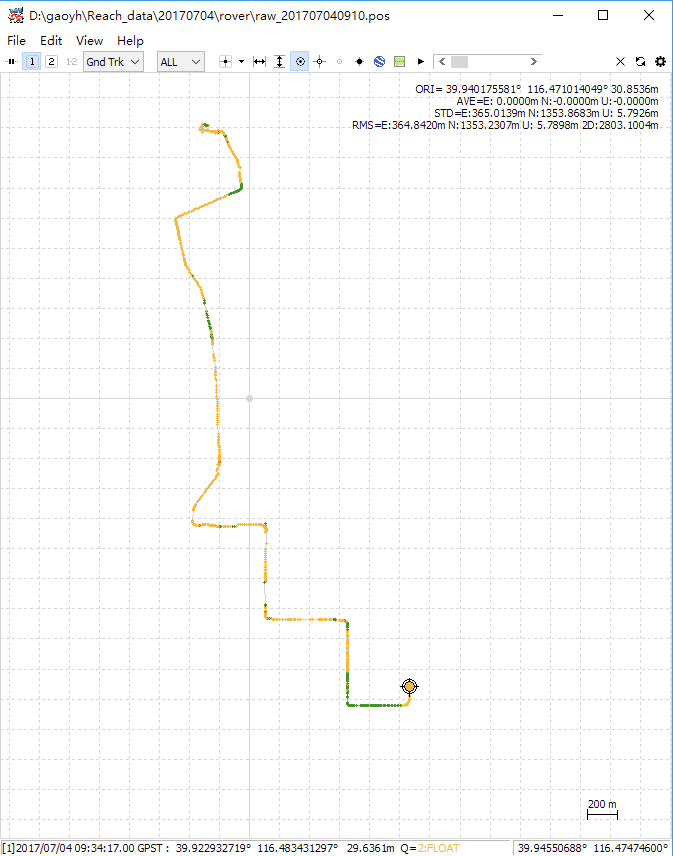
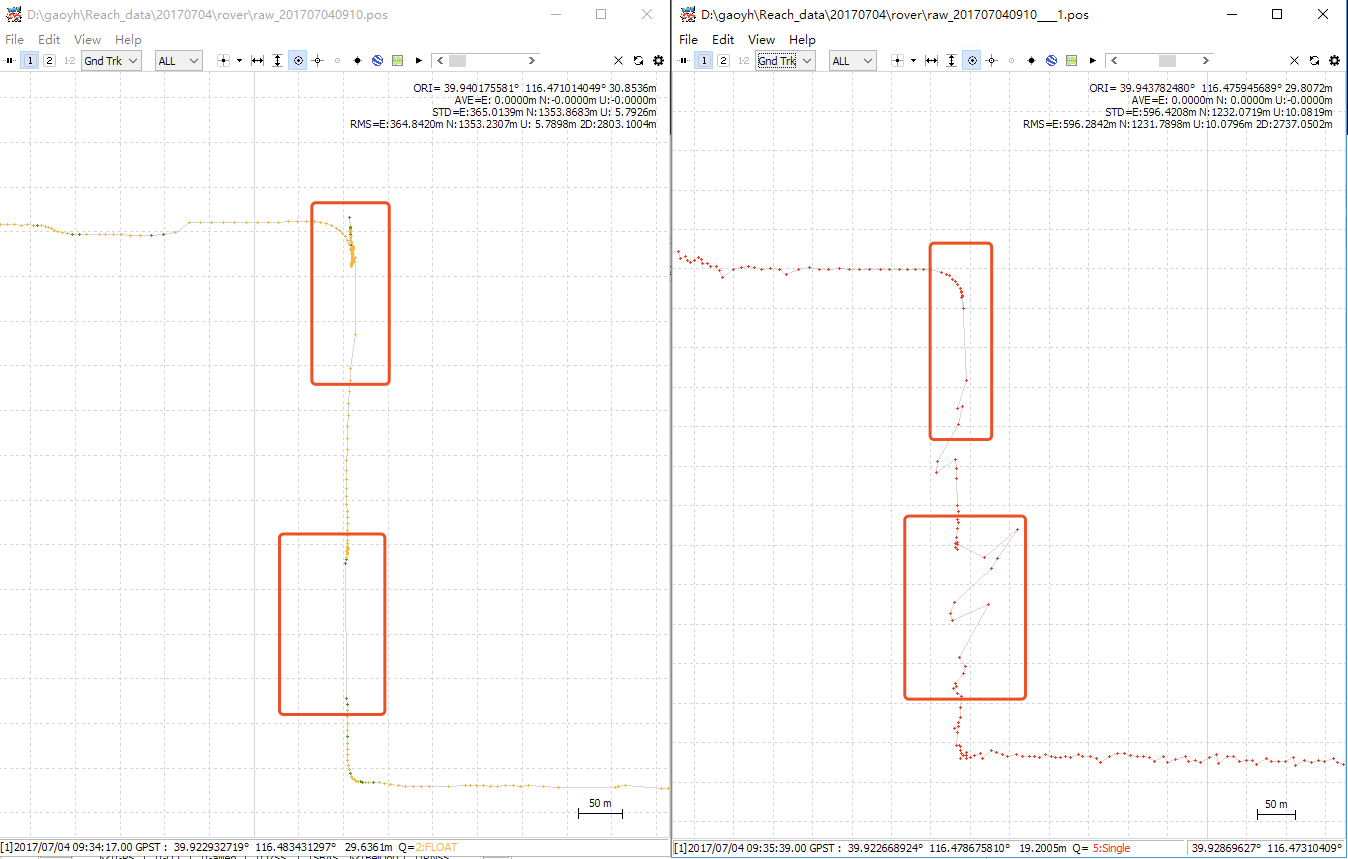
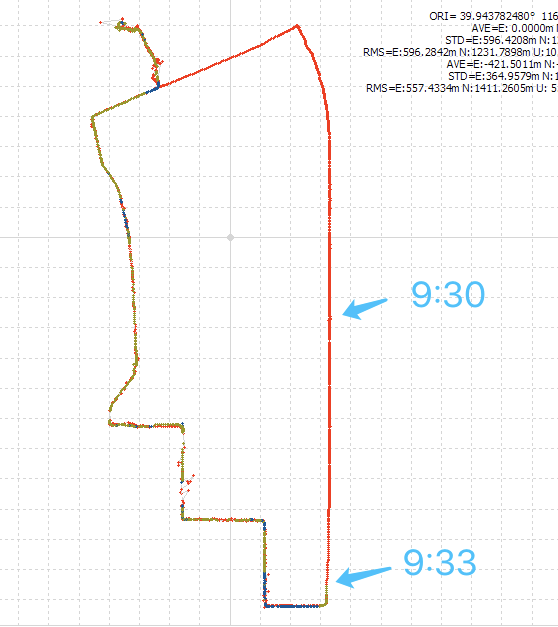
pic2 is the position where the error occurred. I changed the rtk settings in the red rectangle position, but do anything in the blue rectangle position.
You lost correction about half way around. All the way up in your pic nr2.
Also there is alot of interference on your rover, is antenna properly shielded?
edit: 2 sec, just gonna look through output solution
Does it means that Reach RS not save the correction data ?
I restart the rover before the road test. so the raw log data and the rtcm log data should match very good .
and i can see status is in float or fix .
I put the rover and other one antenna on the car side by side . the road status is very good (the sky view is clear).
Does it means I need to process again with some spetial config ?
Do you have picture of your setup? of the rover.
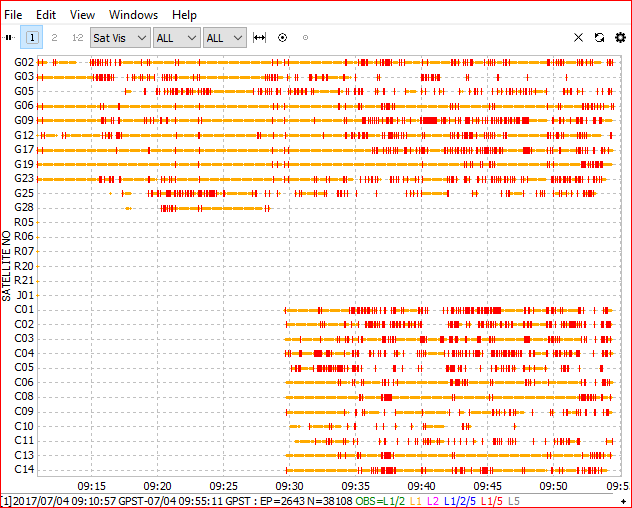
Base data looks ok, but rover had noe C satellites before 9.30 ish, that would explain singel solution up to this point
The RTK setting before 9:30 as below :
Position mode: Kinematic , GPS AR mode: Fix-and hold, GLONASS AR mode : On
GNSS select: GPS , BEIDOU
The RTK setting after 9:30 as below:
Position mode: Kinematic , GPS AR mode: Fix-and hold, GLONASS AR mode : Off
GNSS select: GPS , BEIDOU
I don’t change RTK setting at 9:33 , but the position changed very strange.
Does Reach RS has any position filter ? such as Kalman filtering .
Does Reach RS use IMU to correct position abnormal ?
Did you change anything else then glonass AR off at 9:33? Reboot?
Because raw log from rover shows no Beidou before 9:33
Raw doesnt take any other setting into account, its just raw. All other settings are applied in post process
I’m sure I don’t change RTK setting at 9:33.
below is two screen captures of my phone.
The other question , Does Glonass AR could not use with Beidou at the same time ?
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.