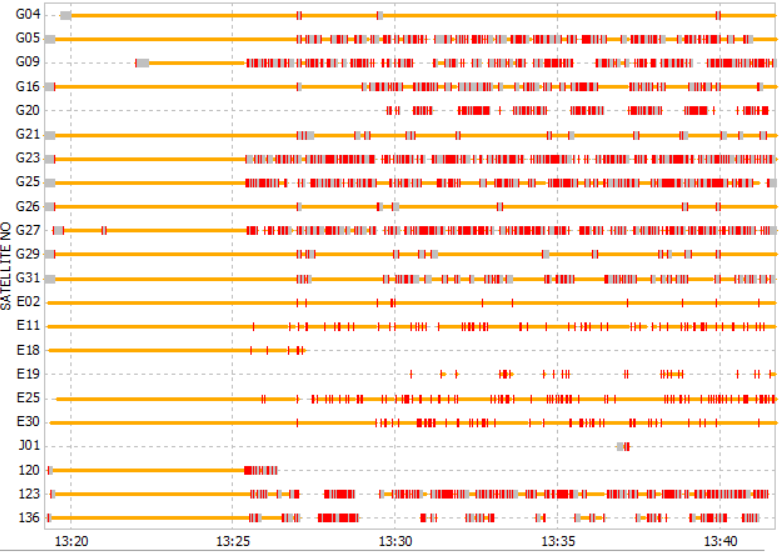
I’m trying to process data from a drone mounted Emlid Reach to give me accurate locations of camera triggers - but I’m struggling to get good results. This is what I’m getting:
How can I process this data to get better results???
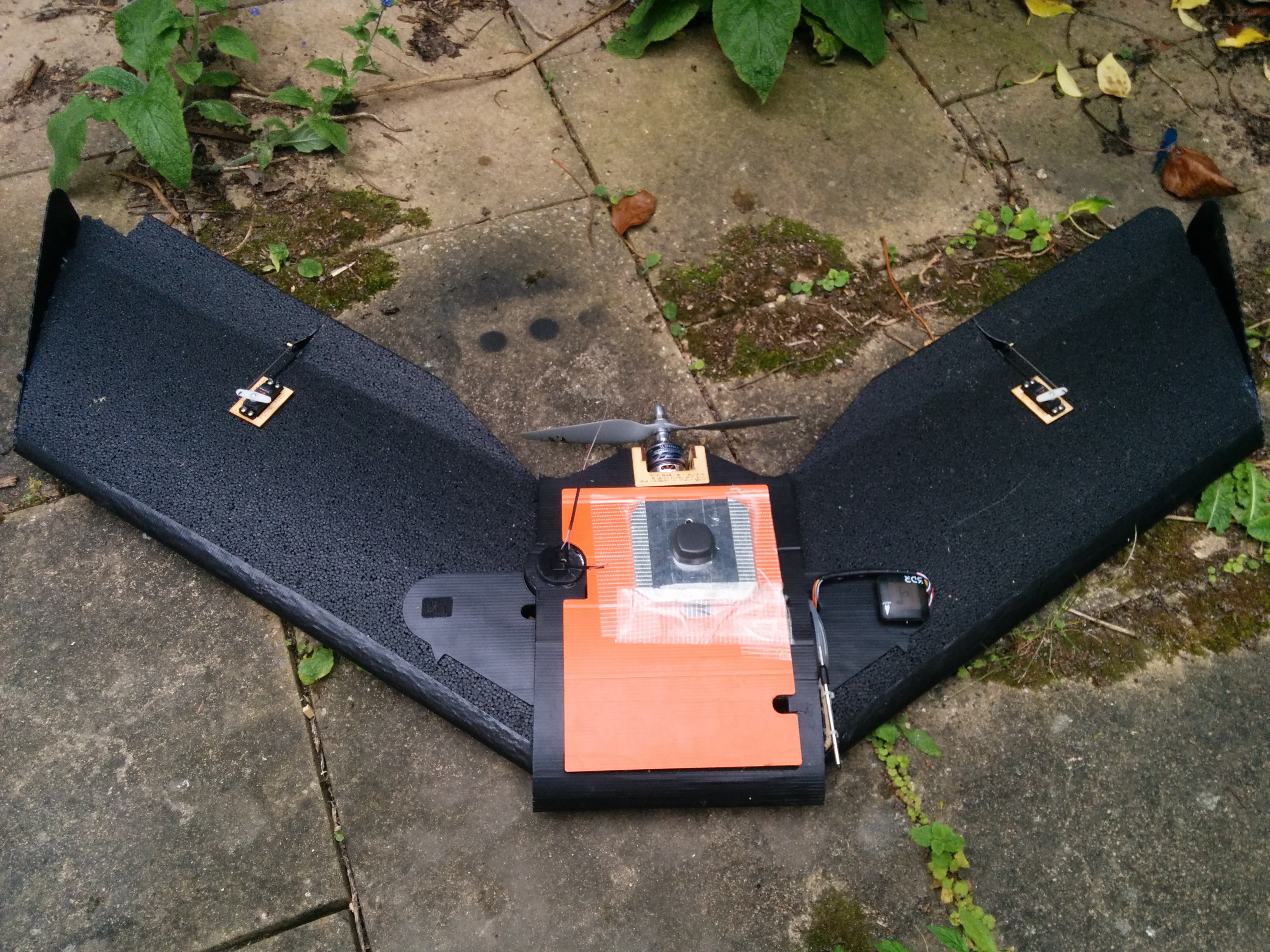
My setup:
Fixed wing drone with Pixhawk flight controller
Emlid Reach with Tallysman antenna, mounted on the top of the UAV with a 10x10 cm ground plane
Camera is a Sony a6000 with a hot shoe feedback cable to the Emlid
NTRIP data streamed over LTE mobile connection from a paid service (UK based), base station is ~4km away
NTRIP corrections are fed to the drone over the telemetry radio using Mission Planner
My hardware setup follows the guidance in the Reach docs for ArduPilot integration.
I processed the data using Emlid RTKLIB following the instructions in the Reach docs for GPS post-processing.
If I reduce the noise/interference will it improve my results, or are there other problems? I.e. is noise my only problem?
In the meantime, it seems to be the main problem.
Do I need to shield only the Reach receiver unit or the antenna and telemetry cables as well?
You can start with shielding Reach, antenna cable and the wiring around it.
Do you have any examples of good shielding or advice for shielding the unit?
Could you please make a forum search on this matter? Noisy electronics shielding was discussed on the forum many times.
After you isolate Reach, you can test the drone on the ground and log Reach data for test purposes. Feel free to post new logs here, we’ll take a look!