



Today, we’d like to shift our focus to Post-Processed Kinematic (PPK) and emphasize the importance of carefully collecting and managing data, which is crucial for achieving the best possible results.
In contrast to RTK, PPK enhances GNSS precision by applying solution computation algorithms after collecting the raw data logs. The quality of your logs is crucial—poor input data will lead to poor results. Let’s see what one should check before recording logs.
Setting up for proper raw data
Before starting to record data in the field, we recommend you check the following recommendations:
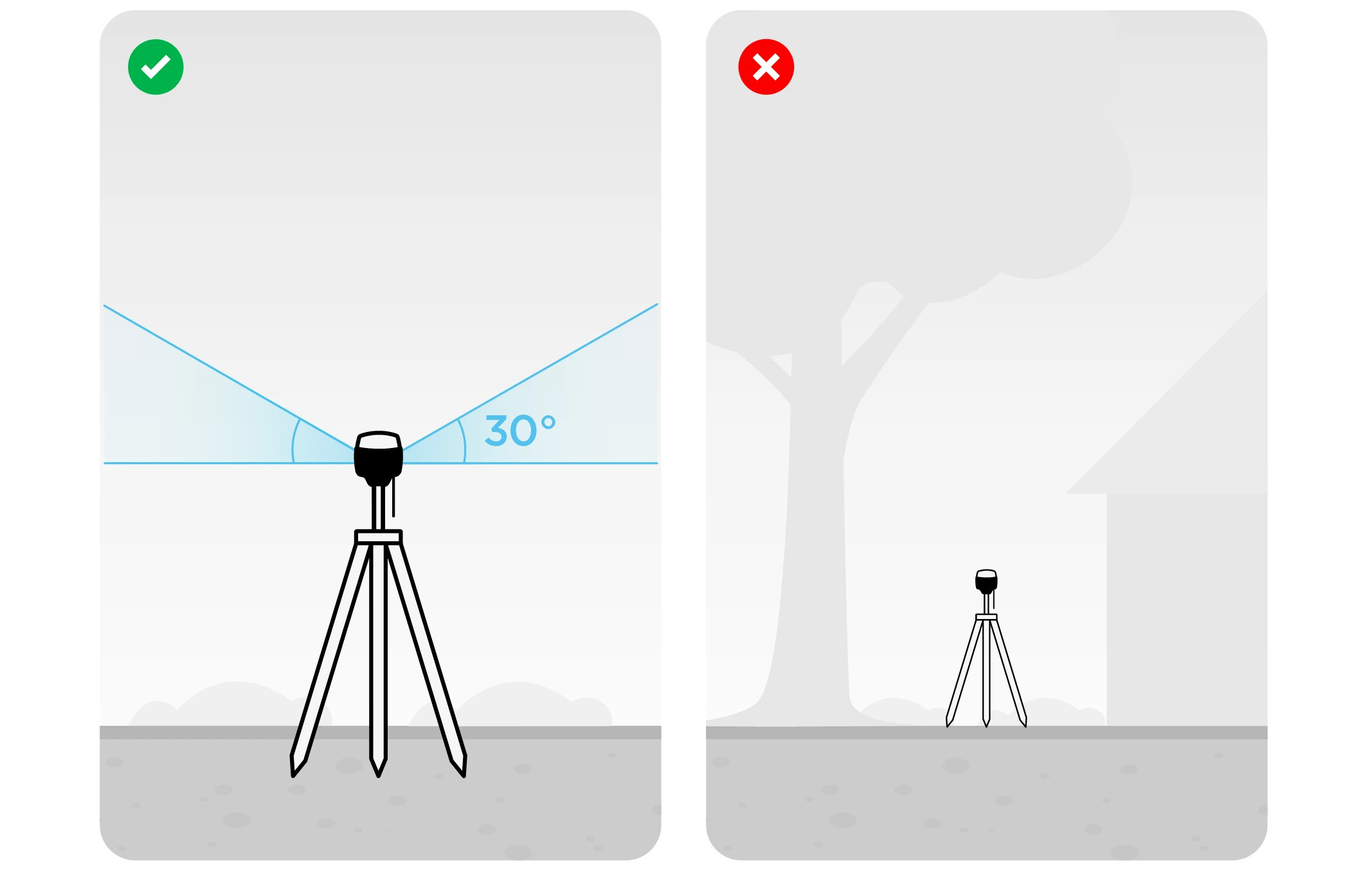
- Place the receivers in an open area with a clear sky view 30 degrees above the horizon.
- Make sure there are no obstacles blocking the view, such as buildings, trees, cars, or humans.
- Check that there are no interference sources. Electronic devices and power lines may produce RF noise that could affect the reception of the GNSS signal.
- Set up a proper update rate for your base and/or rover in Emlid Flow. We recommend keeping a minimum of 1 Hz on the base and 5 Hz on the rover. If you fly a drone, its update rate should be 10 Hz.
Following these recommendations will help you minimize the risk of getting poor data and obtain reliable FIX solutions.
Assessing raw data in Emlid Studio
If you find a high percentage of FLOAT or SINGLE solutions instead of the desired FIX solutions after completing a survey, reviewing the raw data can help identify the cause of the issue. Checking the logs will allow you to determine whether you can improve the data or need to re-survey the area. Also, checking the quality of your logs preemptively is a good habit.
Let’s see how Emlid Studio can help you assess the data. After uploading your data, check the following:
- Signal-to-noise ratio (SNR) values, which reflect the quality of the satellite signals. By examining SNR, you can identify weak signals that might compromise the accuracy of your results.
- Cycle slips, which show disruptions in the signal path that can lead to positioning errors. By checking cycle slips, you can identify cases when signal reception was affected by something, such as electromagnetic interference.
- Satellite distribution, which shows the positions of the satellites and their trajectories in the sky. This way, you can define low-angle satellites that might introduce noise into your data.
To learn more, check the Assessing raw data guide in our documentation. If you have identified areas for improvement, you can adjust some settings before post-processing your data in Emlid Studio.
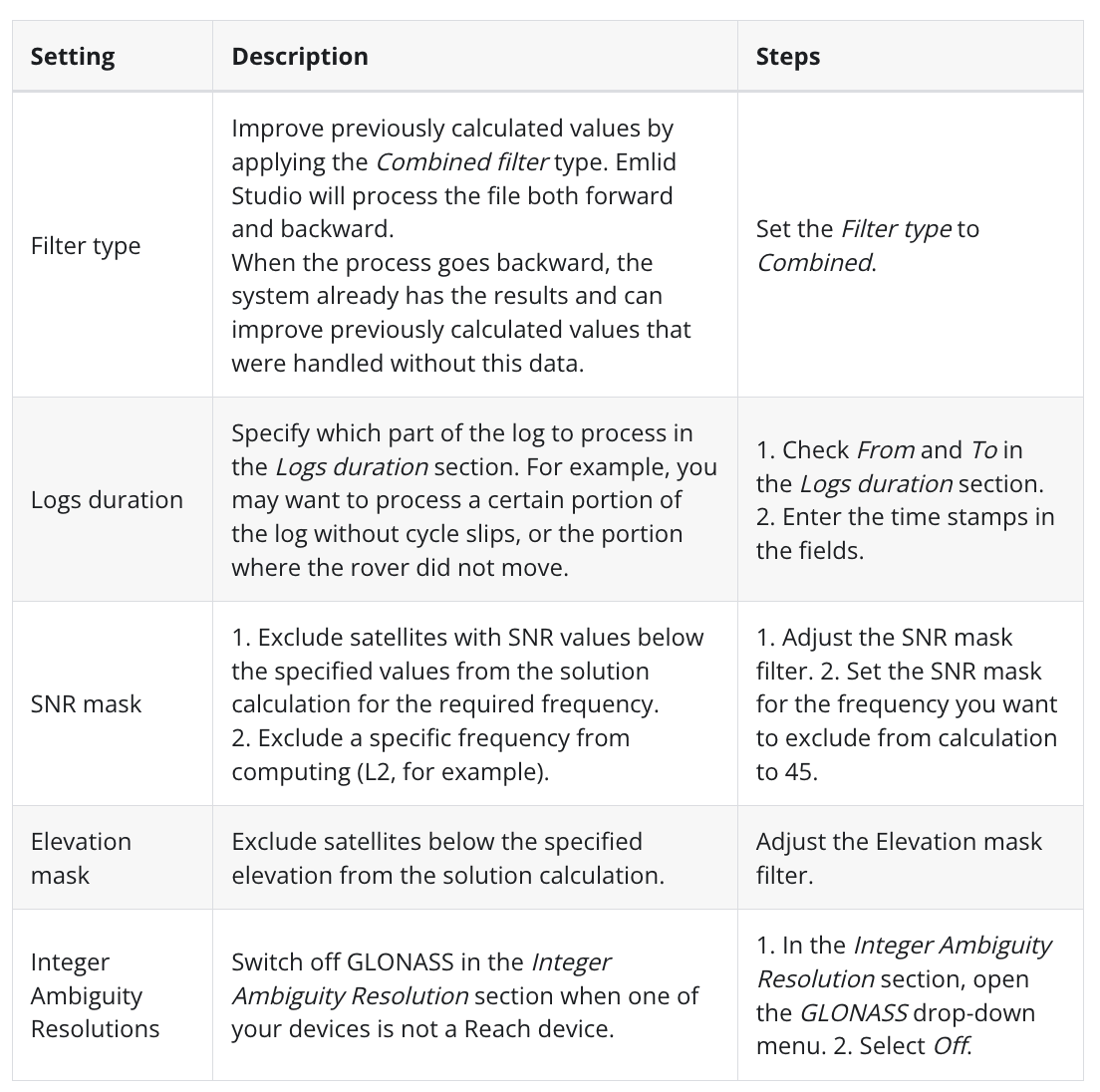
Fine-tuning solution
Once you have assessed your raw data, you can refine your GNSS solution for maximum precision. Emlid Studio offers a range of tools to adjust your data’s parameters, from applying more sophisticated calculation algorithms to excluding compromising data quality satellites. Based on the conclusions made when assessing raw data, use the required settings and check the resulting data.
To learn more, check out the Tuning post-processing solution guide.
However, in some cases, you won’t be able to improve the solution. The only way out here is to re-survey with altered conditions, such as finding a better spot for base placement or a less obstructed sky for your rover.
Have you already tried adjusting settings in Emlid Studio? Share your workflows and thoughts in the comments below or contact us directly at support@emlid.com.