As of now Navio2 is connected to RPI3, no other peripherals (receiver, ESCs, GPS etc.) are connected.
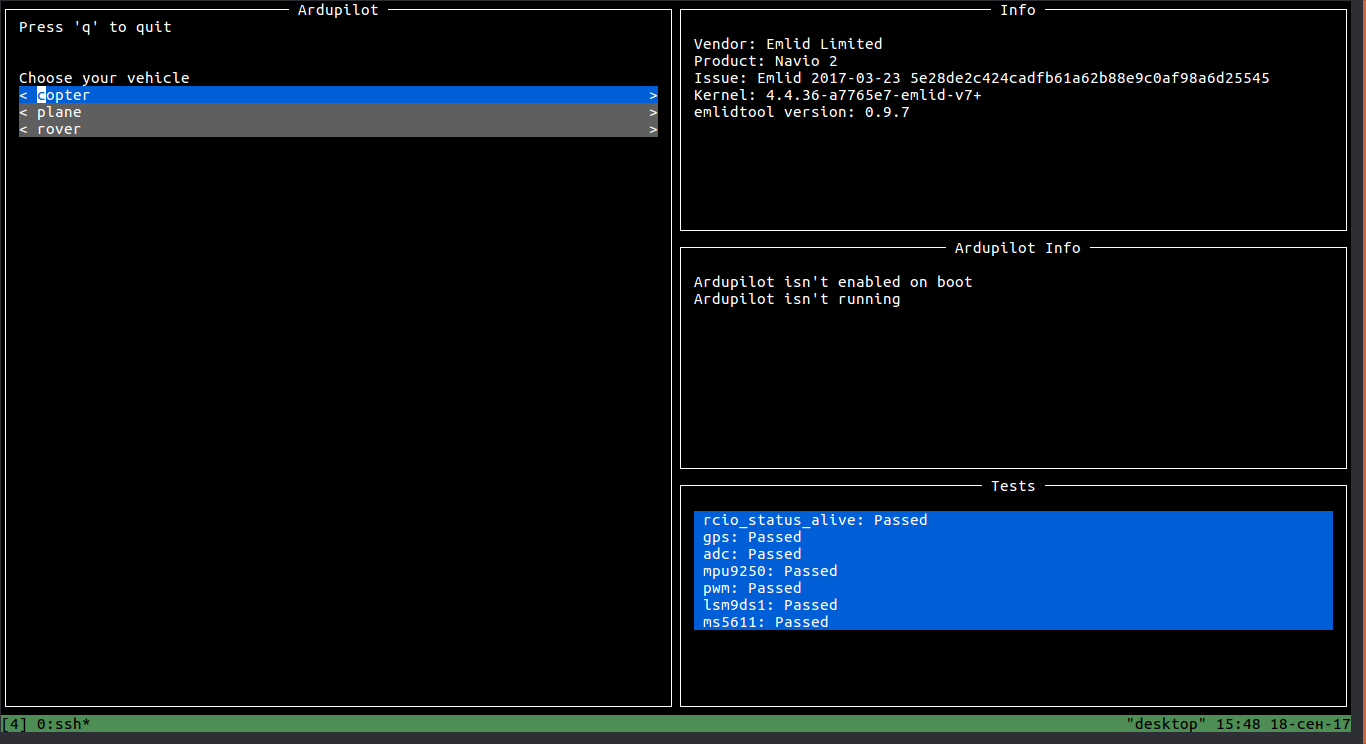
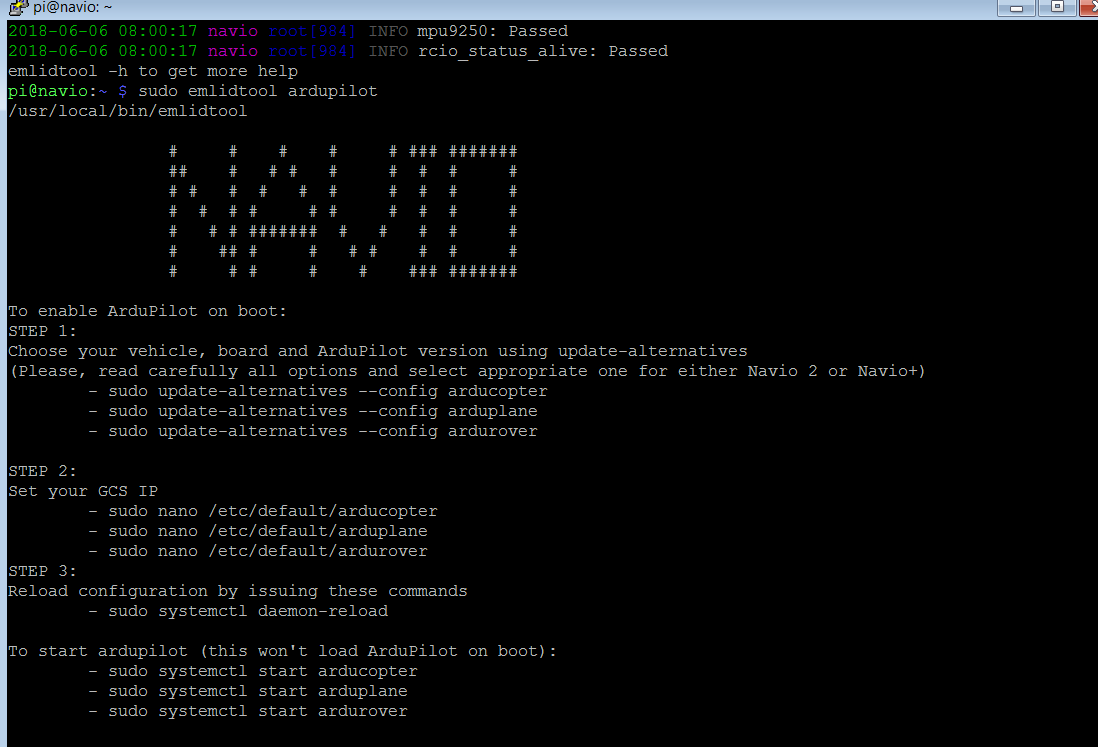
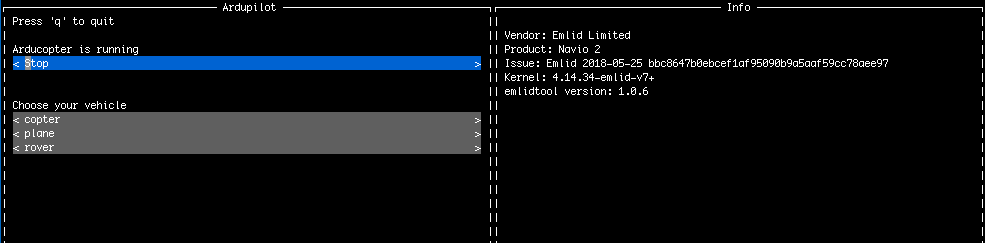
And it’s configured to run Arducopter 3.5.5 on Navio2.
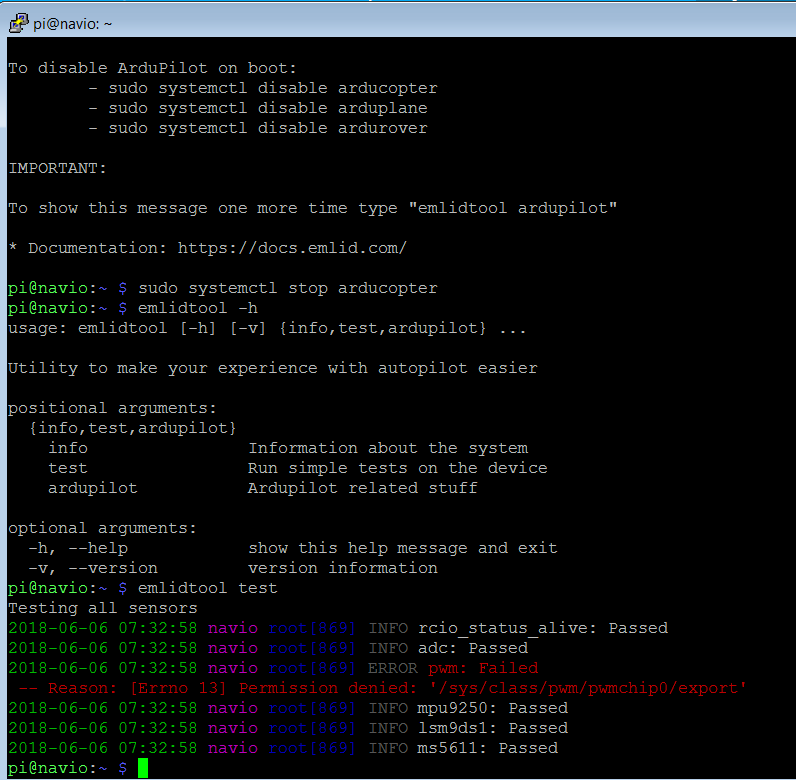
[edit]: the “pwm permission denied” issue was resolved after using “sudo emlidtool test”
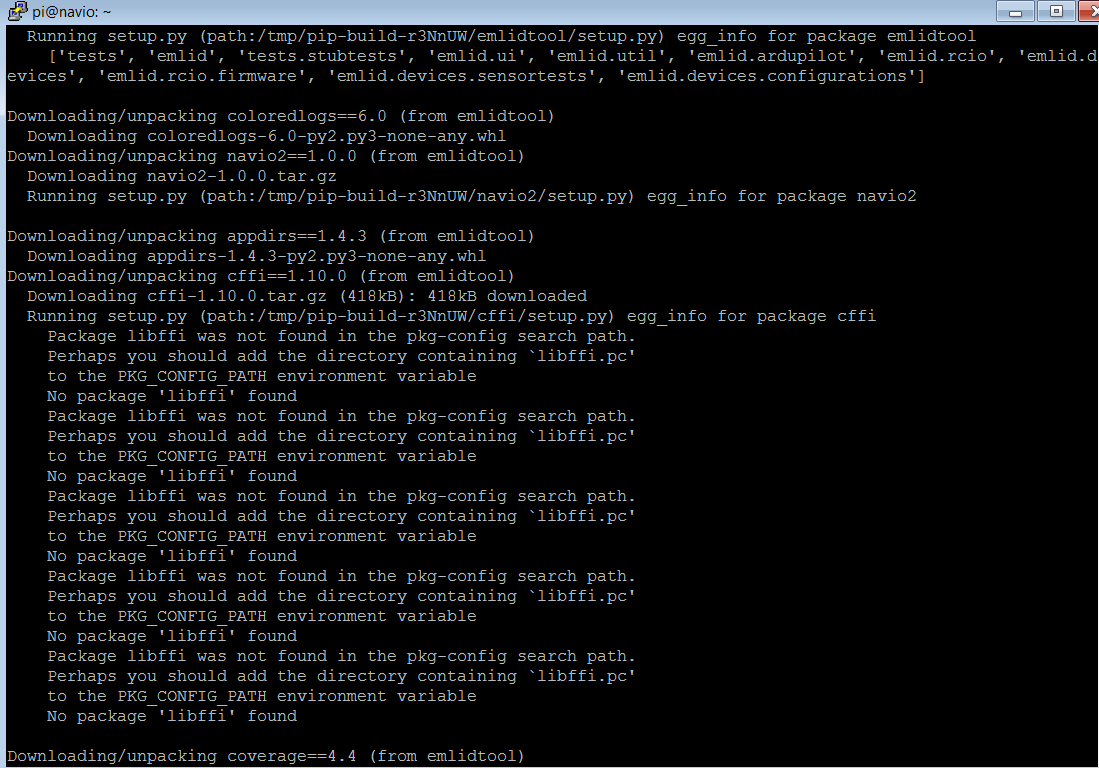
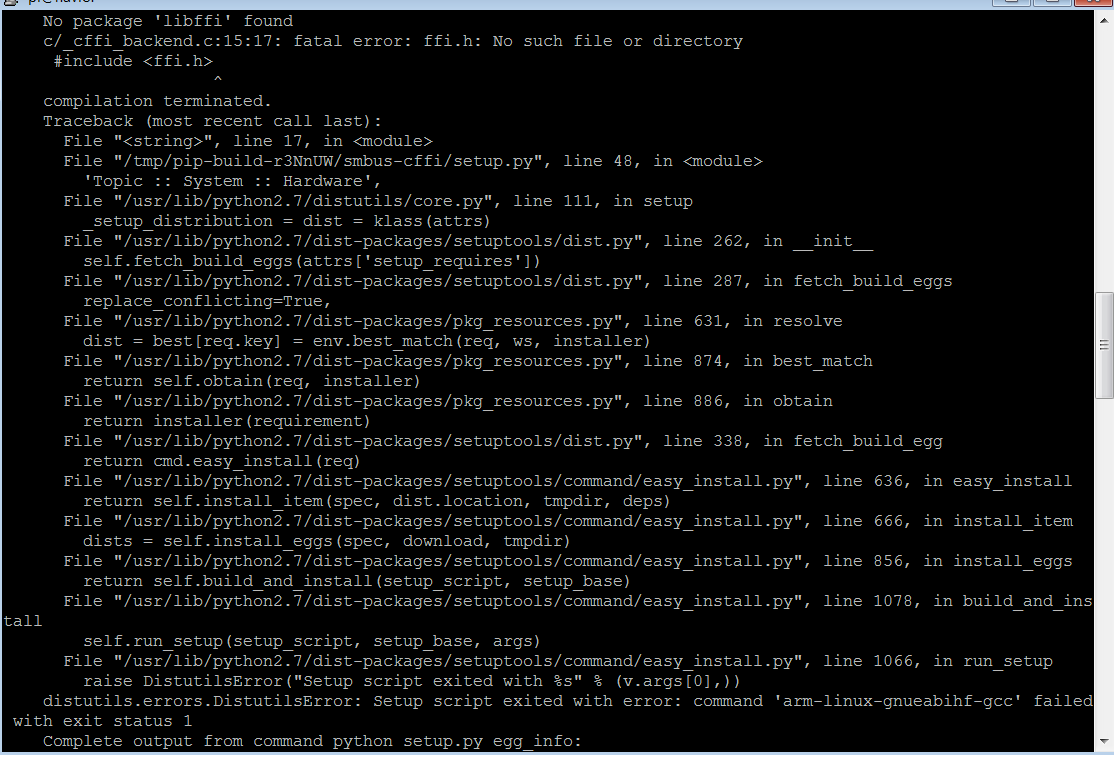
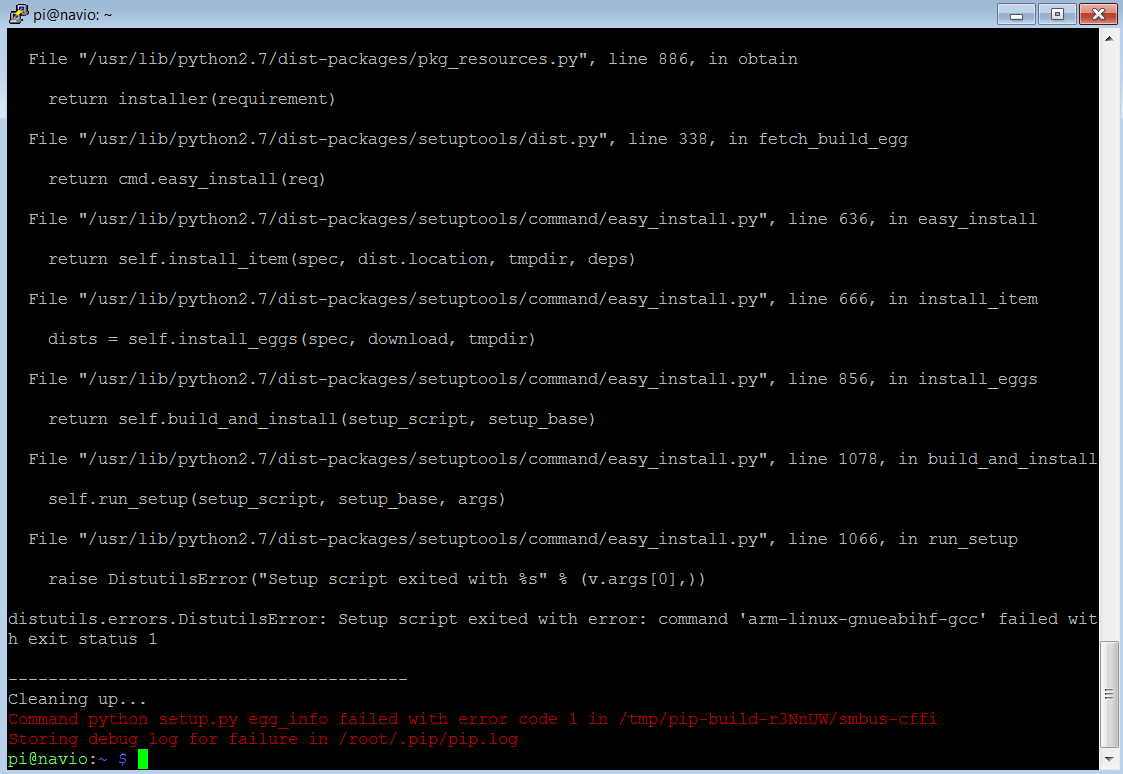
I downloaded Jessie from here, assuming this too will work seamless but it doesn’t seem the case. Ok, I will try Stretch now.
P.S:
Will that be a good idea to remove the Jessie from the list or at least leave a note there for newbies as it doesn’t align with the latest documentation.