



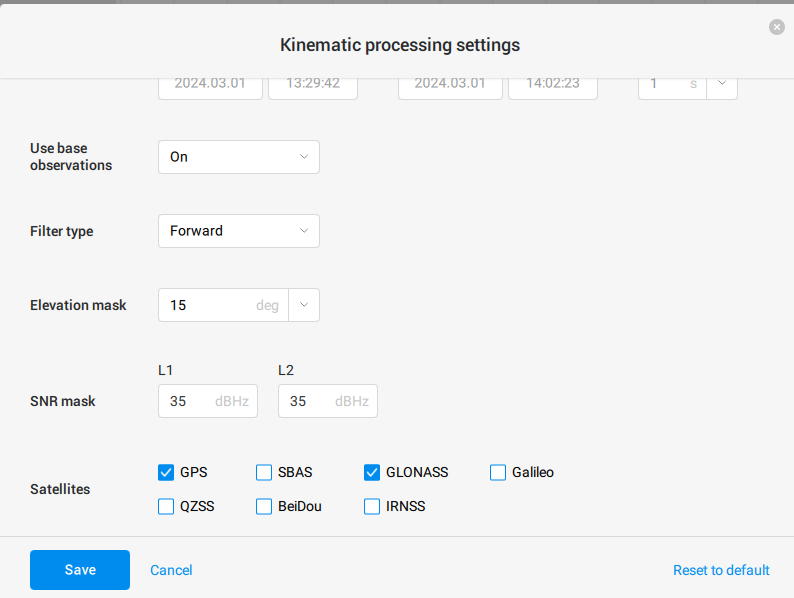
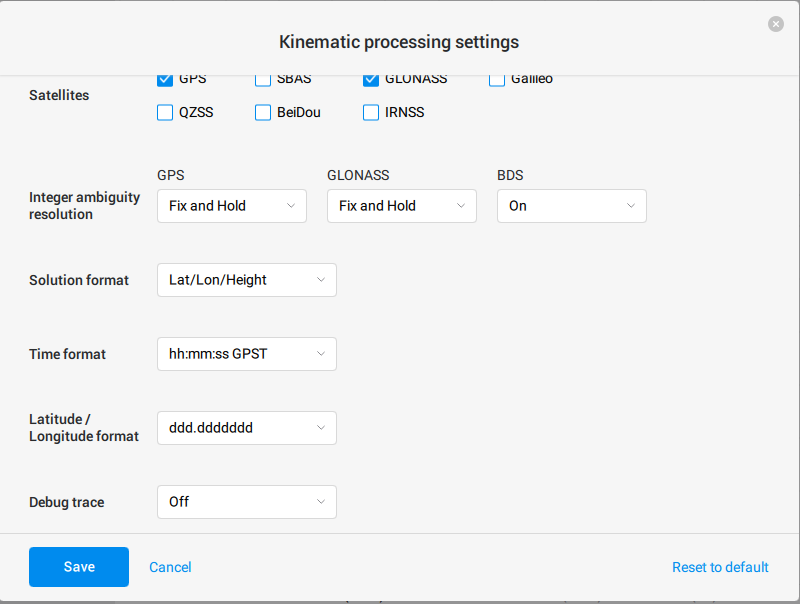
I have a rover that can move or stay in one position. At the moment it is in one position and sends data in rtcm3 format. I also have a RINEX file from a base station that is not moving(with GPS and GLO). Since the rover is not moving, I expect to get the points as close as possible to each other (up to 20cm). But I can’t figure out how to set up the program correctly, since I end up with a spread of more than 20m.
Thanks in advance for your help, I’m new to this.
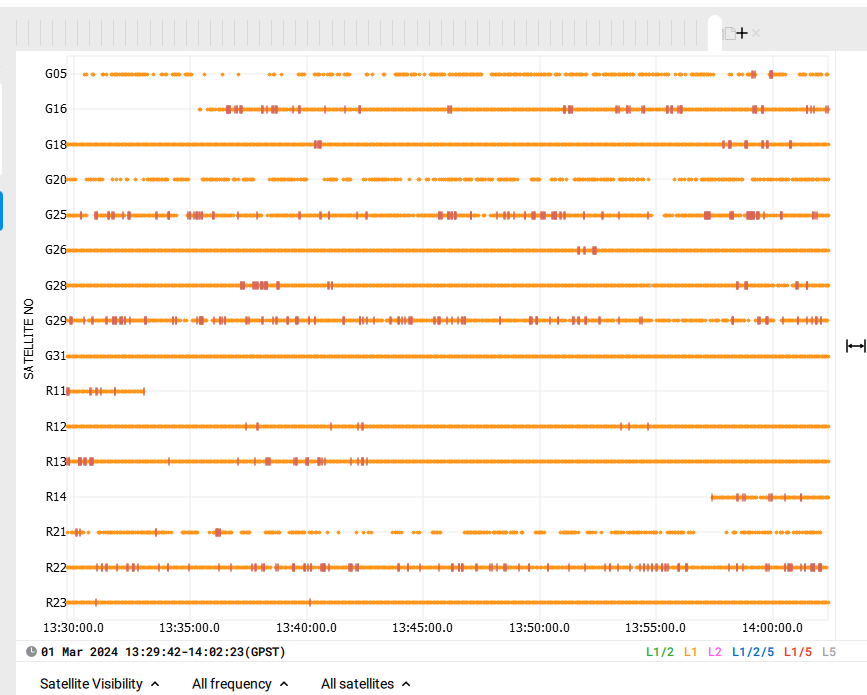
Last photo - rover RINEX