To learn more about MAVLink and its abilities, please refer to the developer’s documentation. Working with MAVLink directly is rather for advanced users and developers. If you’ve just started, I recommend working with Mission Planner or QGroundControl.
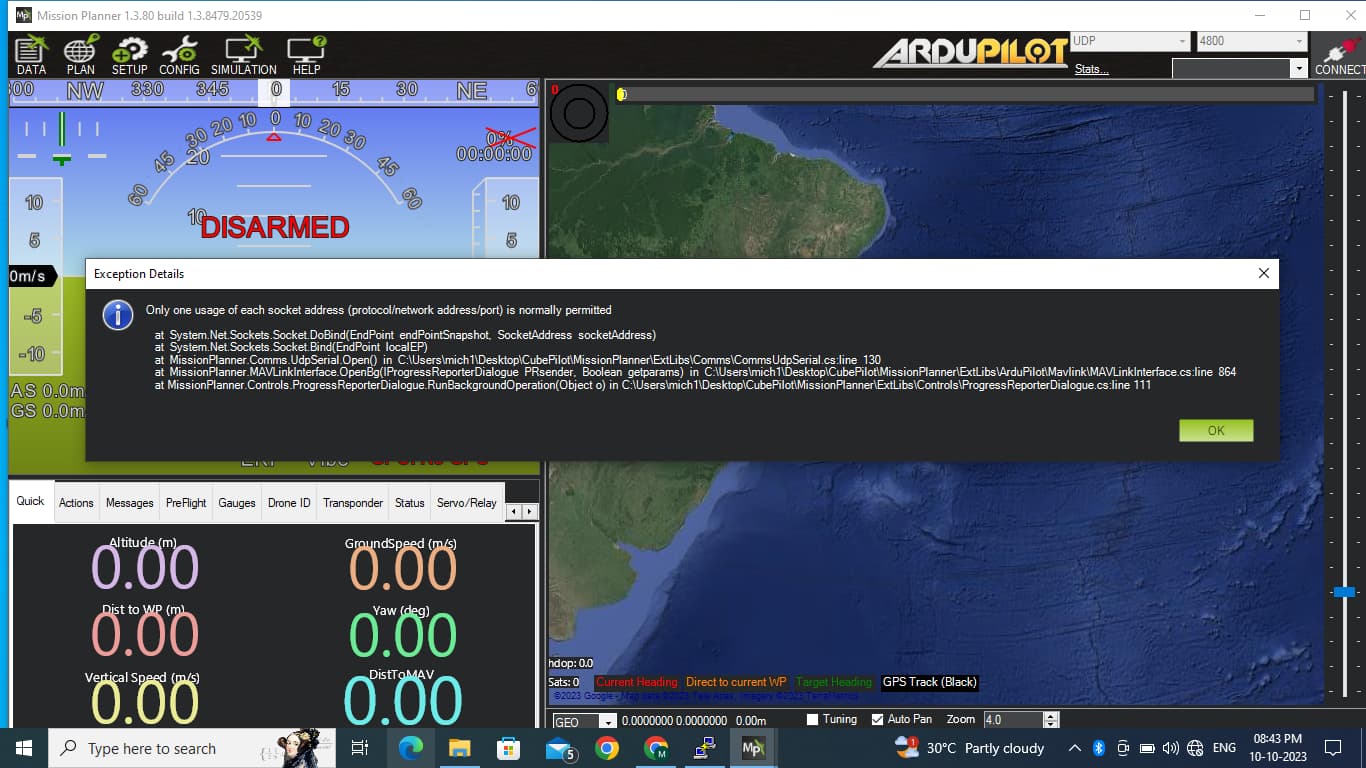
Well, I need the understanding of “It was connected perfectly with the MavLink”.Because I have integrated the Mavlink in Navio2 Controller, But I can’t unable to access the other Like GPS, Compass and All. Meanwhile I used Mission Planner to connect it to setup and but it’s not connecting and it shows
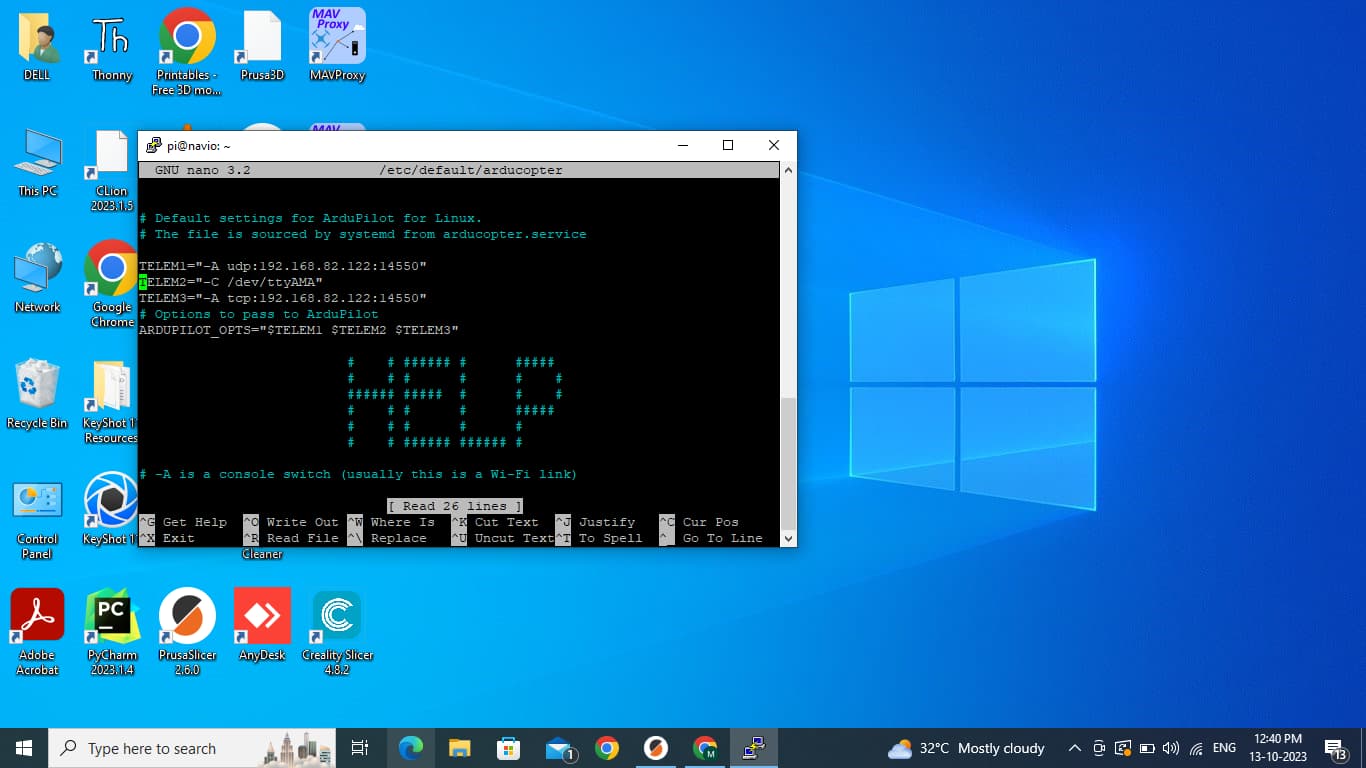
It seems that the port you’re trying to use for the UDP connection is already occupied for some other purpose. What port have you configured in the settings of the /etc/default/arducopter file? The default port for UPD is 14550.