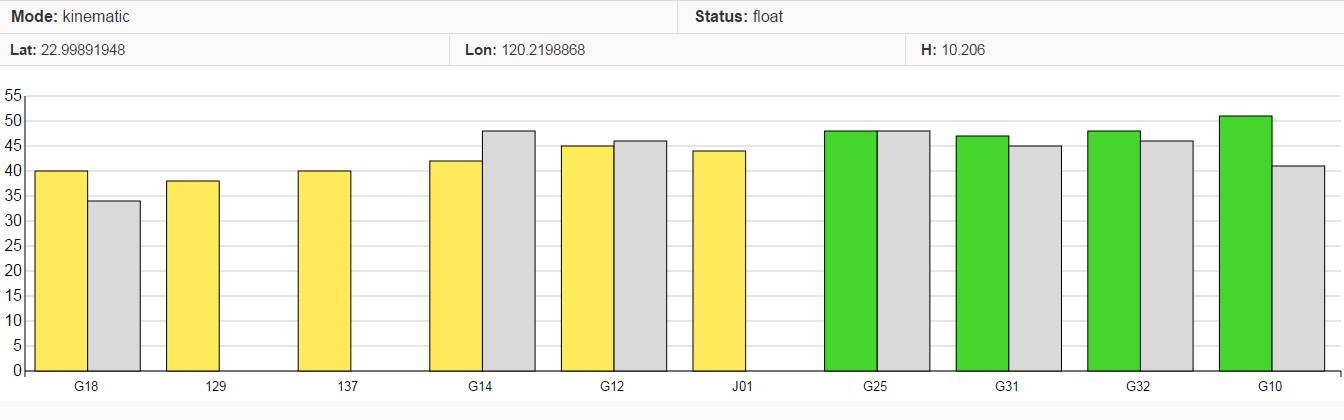
ReachView RTK mode showed float/fix,but drone sometimes drift.
How to confirm that Pixhawk and Reach RTK integrate successfully?
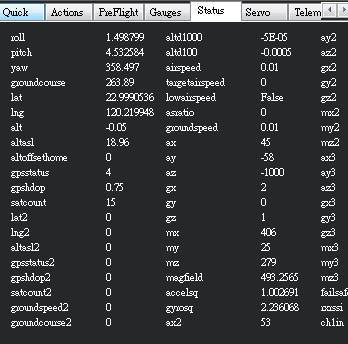
Mission Planner gpsstatus2 didn’t report any message,such as gps satellites.
ReachView version : 0.4.9
Reach image version: v1.2
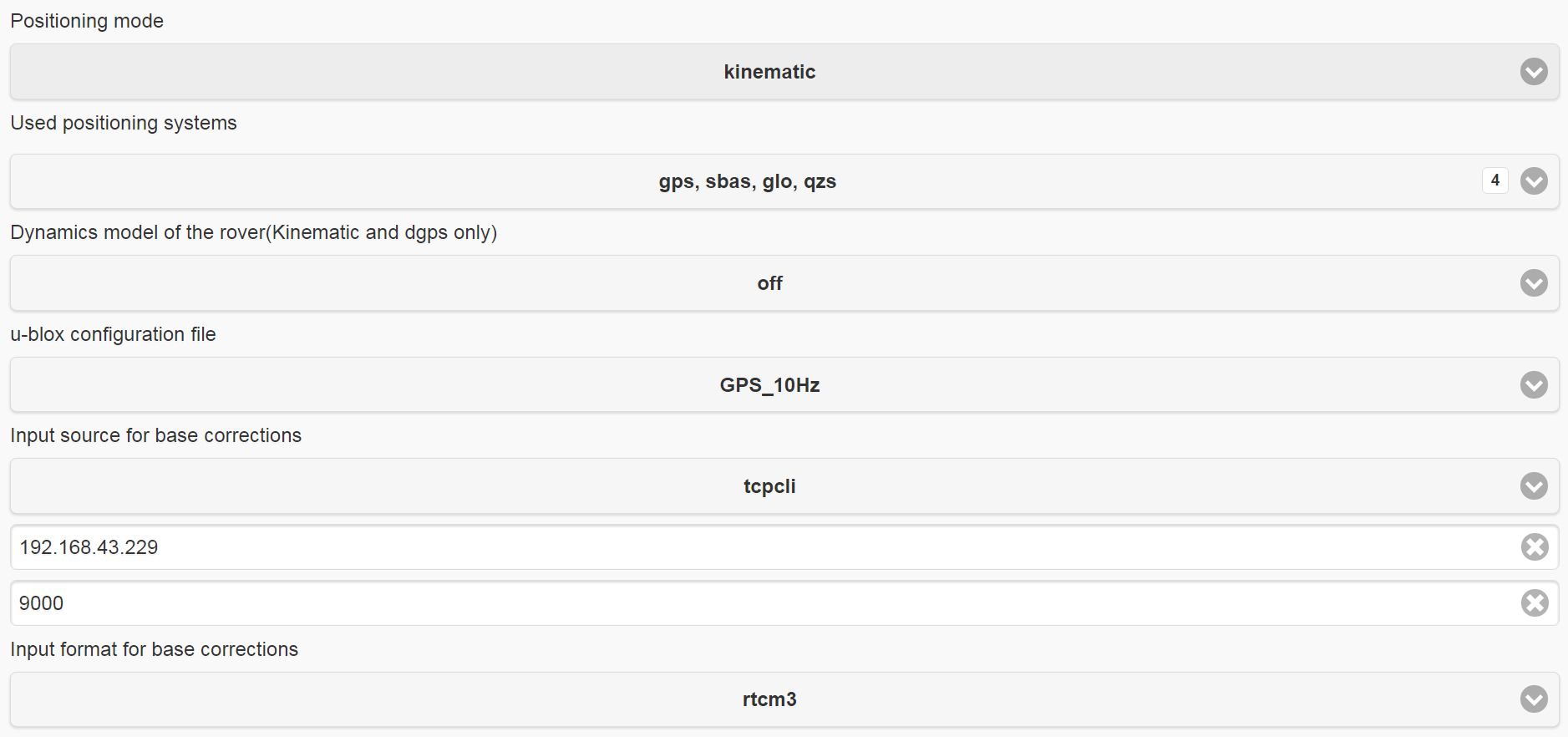
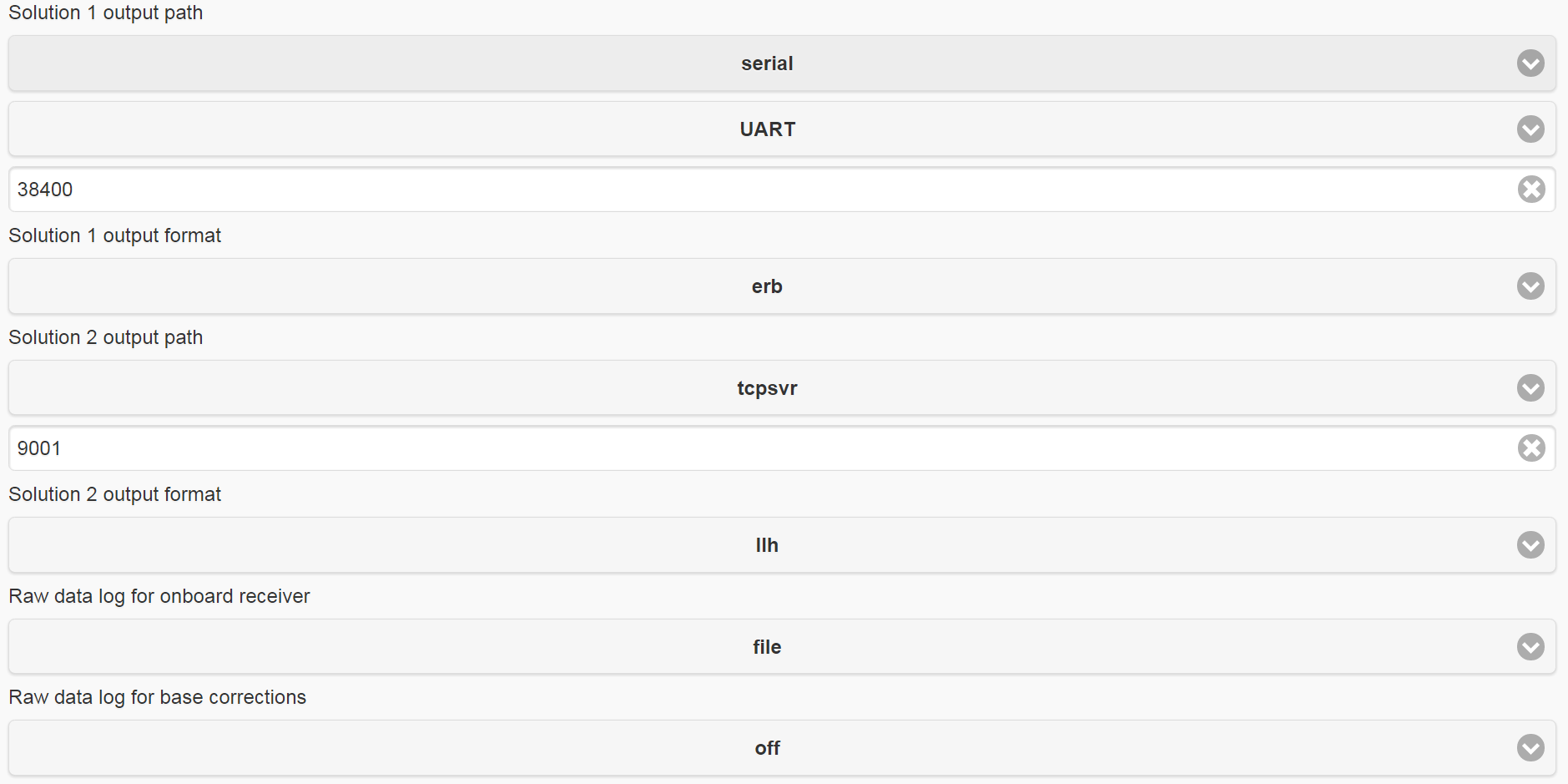
there is my configuration below.
HI , I have downloaded the firmware you provided , but i am not sure which one is correct , can you tell me whats the meaning of heli , hexa , octa ,single, etc .