I use two Reach RS+ units in RTK mode via LoRa for surveying and observe the following behavior: When the rover has a “Fix” position and I switch the base off, the rover keeps the “Fix” for about 90 seconds or sometimes longer. During this time without corrections, is the calculated position of the rover still a “valid” fix? It seems a little strange to me, that the rover can keep the fix without corrections.
The corrections are accounting for variations in the orbit of the satellites and I think mostly for the atmospheric delay. So you can use a received set of correction messages for a few seconds while waiting for the next set. I’m not sure how long is too long, but the obvious thing is that the variables are always changing, so reusing the same corrections for a long duration will just give a more degraded position solution.
The question is where is the crossover point when it is better to release the ‘fix-and-hold’ and drop back to single solution. It also sort of depends on the use-case. One might be looking for “best possible coordinates with the information available” and someone else might be looking for “2-cm or better coordinates otherwise don’t bother showing anything”.
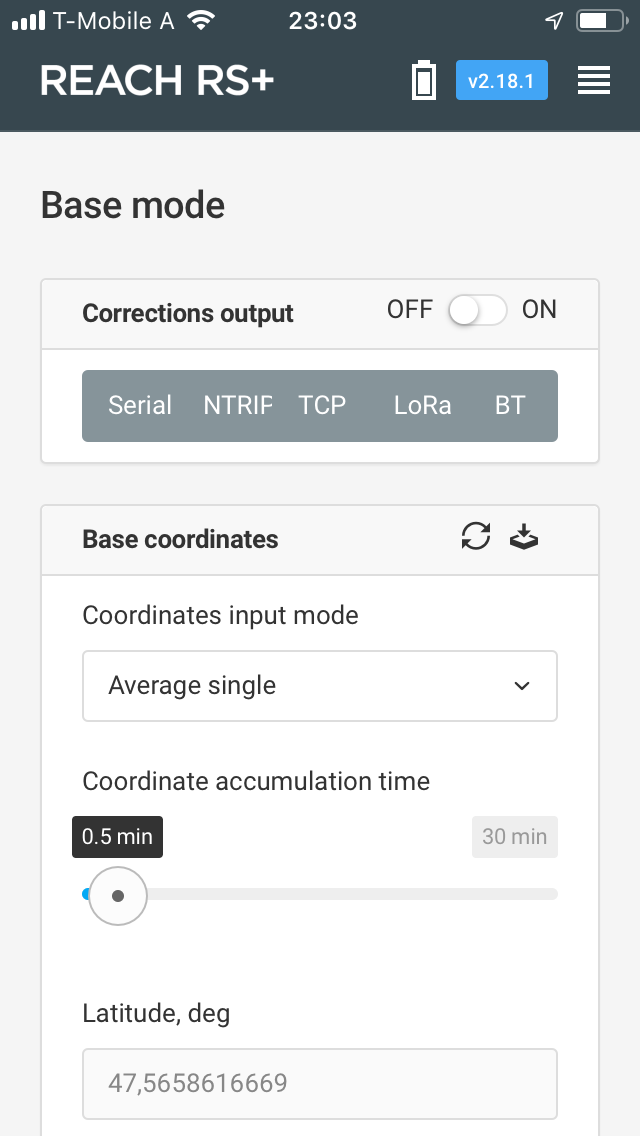
I have done some more testing on this issue. After having a stable fix I switched off the corrections output in my base unit, as you can see on this screenshot:
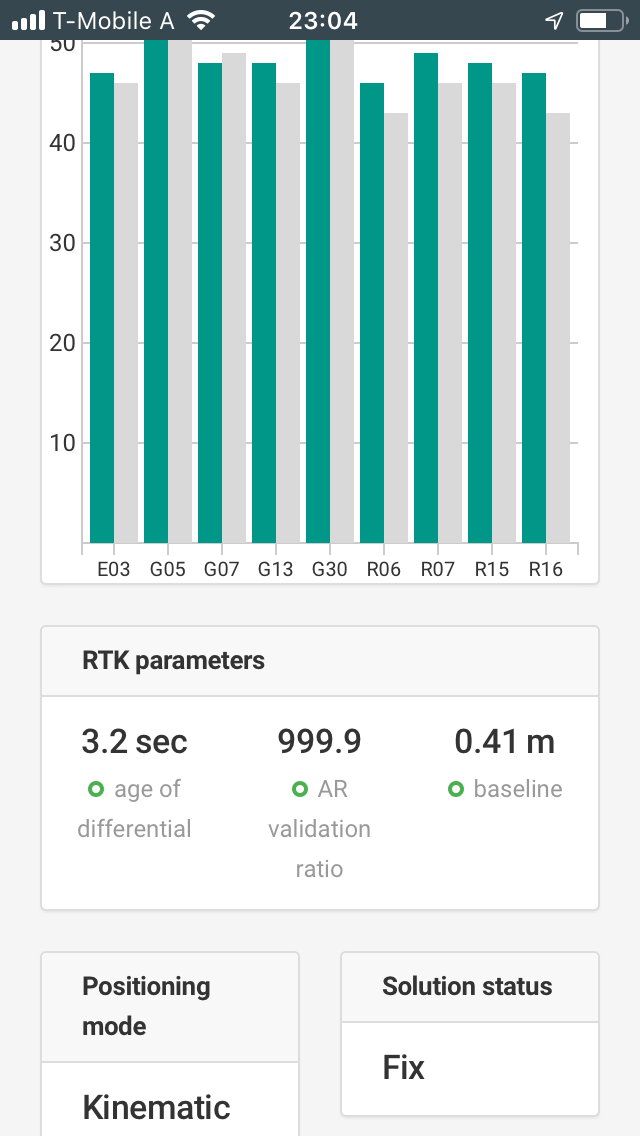
After 20 (!) minutes my rover unit still had a fix position. The grey bars on the status page still move while corrections are switched off in the base unit: