



Hi, I’m having problems with the HMC5883l with 400kHz and 100kHz, it is being recognized by the I2C normally.

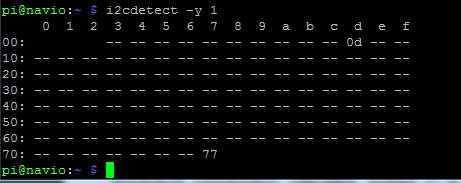
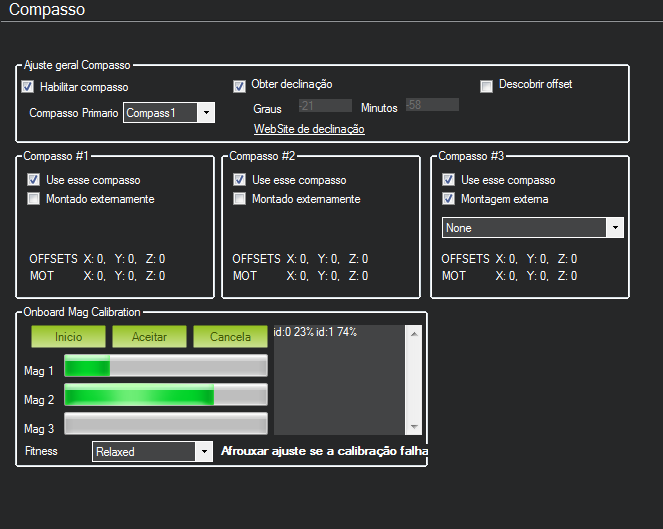
Already in the mission planner it is not recognized and also does not start the onboard calibration.
I am using APMCopter version 3.5.5.
![]()
Hi, I’m having problems with the HMC5883l with 400kHz and 100kHz, it is being recognized by the I2C normally.
Already in the mission planner it is not recognized and also does not start the onboard calibration.
I am using APMCopter version 3.5.5.
![]()
Hi,
Could you please share your hardware setup photo?

What’s the supply voltage of the sensor? The output voltage of Navio I2C port is 5V, please make sure that it isn’t too much for your sensor.
Did you check that this sensor is supported by Ardupilot?
Hi,
How is it going? Did you solve the issue?
A post was split to a new topic: Inaccurate barometer reading
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.