Hi
Please help by giving steps to set up base and rover for RTK using reachview 3 and communicating via lora.
I am using reach rs+
Thank you
Hi
Please help by giving steps to set up base and rover for RTK using reachview 3 and communicating via lora.
I am using reach rs+
Thank you
Hi, have you followed this guide?
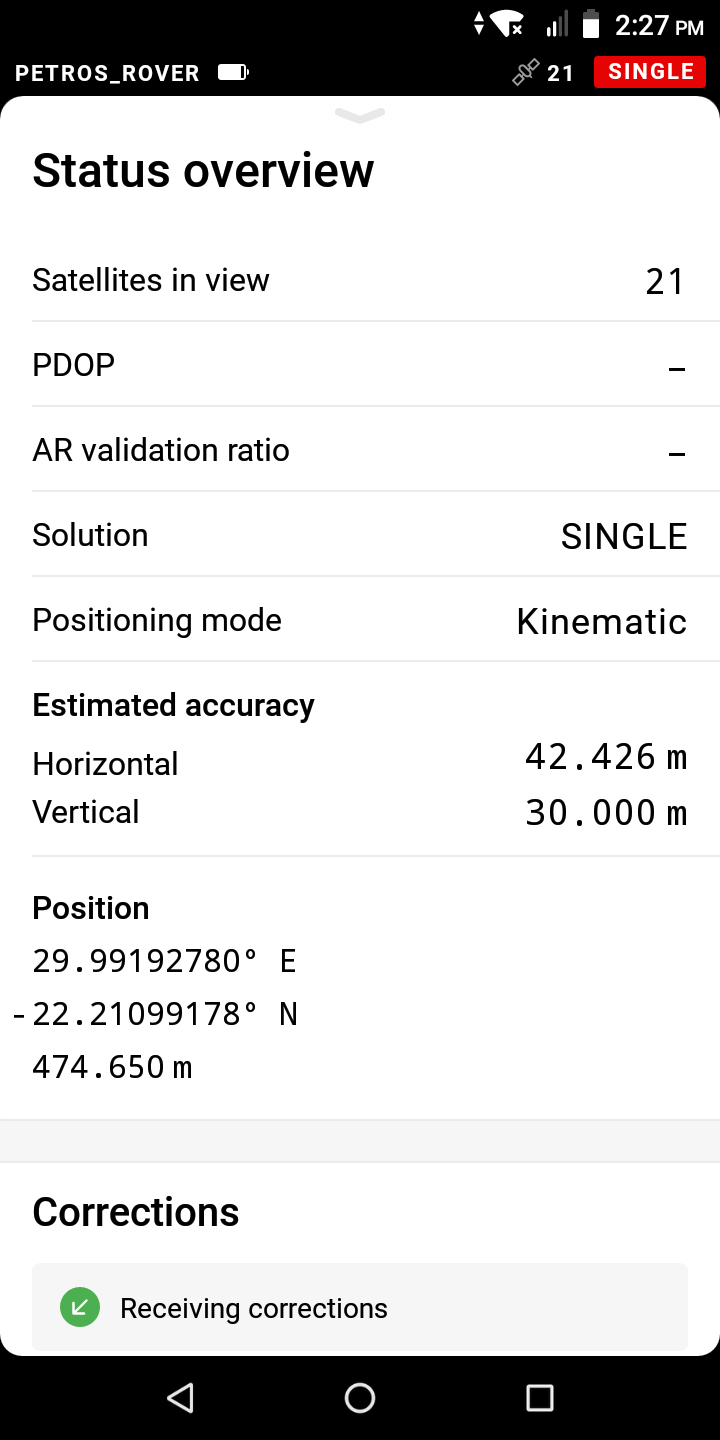
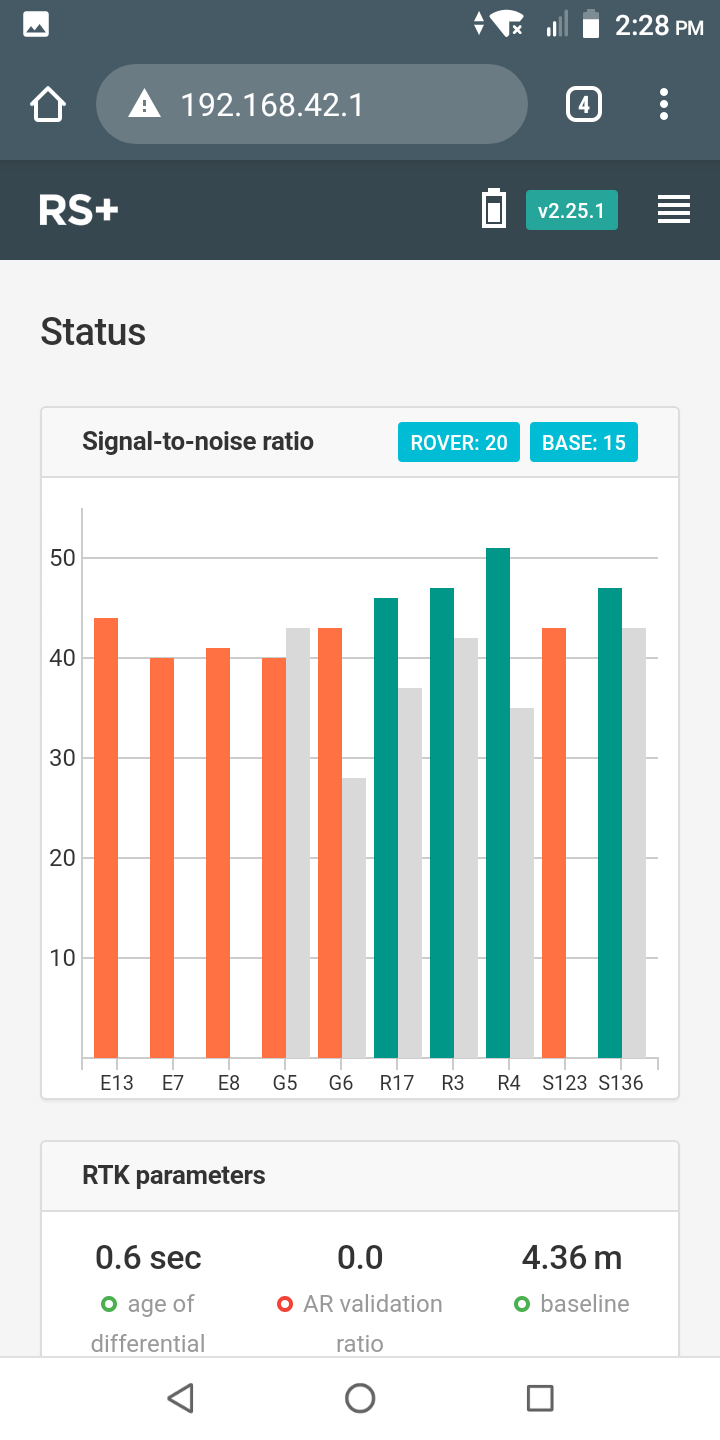
Yes I have - using the reachview 2 and have not managed to get any corrections. Am not sure what I am missing in the configs
Can you post system report of both base and rover?
HERE ARE THE REPORTS, Thanks
ROVER
app version: 2.25.1-dev
current_network:
ip: 192.168.42.1
security: wpa-psk
ssid: Petros_Rover:6E:9E
enabled: true
mode: hotspot
base_mode:
base_coordinates:
accumulation: 132
mode: single-and-hold
output:
io_type: 'off'
settings:
cloud:
mount_point: ''
lora:
air_rate: 9.1099999999999994
frequency: 868100
output_power: 20
ntripsvr:
address: ''
mount_point: ''
password: '***'
port: -1
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: 192.168.42.1
port: 9000
tcpsvr:
port: 9000
rtcm3_messages:
message_1002:
enabled: true
frequency: 1
message_1006:
enabled: true
frequency: 0.10000000000000001
message_1010:
enabled: true
frequency: 0.5
message_1097:
enabled: true
frequency: 0.5
message_1107:
enabled: false
frequency: 1
message_1117:
enabled: false
frequency: 1
message_1127:
enabled: false
frequency: 1
bluetooth:
enabled: false
pairing:
discoverable: false
pin: '***'
correction_input:
base_corrections:
io_type: lora
settings:
bluetooth:
send_position_to_base: false
cloud:
mount_point: ''
send_position_to_base: true
lora:
air_rate: 9.1099999999999994
frequency: 868100
output_power: 20
send_position_to_base: false
ntripcli:
address: 196.15.132.3
mount_point: tdou
password: '***'
port: 2101
send_position_to_base: true
username: masuuk2017
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: false
tcpcli:
address: 192.168.42.1
port: 9000
send_position_to_base: false
tcpsvr:
port: 10000
send_position_to_base: true
device:
power_on_bottom_connector: true
privacy_policy_accepted: true
role: null
usage_analysis_accepted: true
logging:
logs:
base:
format: RTCM3
started: true
correction:
format: RTCM3
started: true
raw:
format: UBX
started: true
solution:
format: LLH
started: true
settings:
debug: false
interval: 22
overwrite: true
position_output:
output1:
io_type: tcpsvr
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: XYZ
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
output2:
io_type: 'off'
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: XYZ
port: 9001
positioning_settings:
elevation_mask_angle: 25
glonass_ar_mode: true
gnss_settings:
positioning_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: false
sbas: false
update_rate: 5
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 10
max_vertical_acceleration: 1.2
positioning_mode: kinematic
snr_mask: 32
BASE
app version: 2.25.1-dev
current_network:
ip: 192.168.42.1
security: wpa-psk
ssid: Masuuk_Base:84:14
enabled: true
mode: hotspot
base_mode:
base_coordinates:
accumulation: 192
mode: single-and-hold
output:
io_type: lora
settings:
cloud:
mount_point: ''
lora:
air_rate: 9.1099999999999994
frequency: 868000
output_power: 20
ntripsvr:
address: ''
mount_point: ''
password: '***'
port: -1
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: localhost
port: 9001
tcpsvr:
port: 9000
rtcm3_messages:
message_1002:
enabled: true
frequency: 1
message_1006:
enabled: true
frequency: 0.10000000000000001
message_1010:
enabled: true
frequency: 0.5
message_1097:
enabled: true
frequency: 0.5
message_1107:
enabled: false
frequency: 1
message_1117:
enabled: false
frequency: 1
message_1127:
enabled: false
frequency: 1
bluetooth:
enabled: false
pairing:
discoverable: false
pin: '***'
correction_input:
base_corrections:
io_type: tcpsvr
settings:
bluetooth:
send_position_to_base: false
cloud:
mount_point: ''
send_position_to_base: true
lora:
air_rate: 9.1099999999999994
frequency: 868000
output_power: 20
send_position_to_base: false
ntripcli:
address: 196.15.132.3
mount_point: tdou
password: '***'
port: 2101
send_position_to_base: true
username: masuuk2017
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: false
tcpcli:
address: 192.168.42.1
port: 9000
send_position_to_base: true
tcpsvr:
port: 10000
send_position_to_base: true
device:
power_on_bottom_connector: false
privacy_policy_accepted: true
role: null
usage_analysis_accepted: true
logging:
logs:
base:
format: RTCM3
started: true
correction:
format: RTCM3
started: true
raw:
format: UBX
started: true
solution:
format: ENU
started: true
settings:
debug: false
interval: 24
overwrite: true
position_output:
output1:
io_type: tcpsvr
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9000
output2:
io_type: 'off'
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9000
positioning_settings:
elevation_mask_angle: 18
glonass_ar_mode: true
gnss_settings:
positioning_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: false
sbas: false
update_rate: 1
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 1.1000000000000001
max_vertical_acceleration: 1.1000000000000001
positioning_mode: kinematic
snr_mask: 34
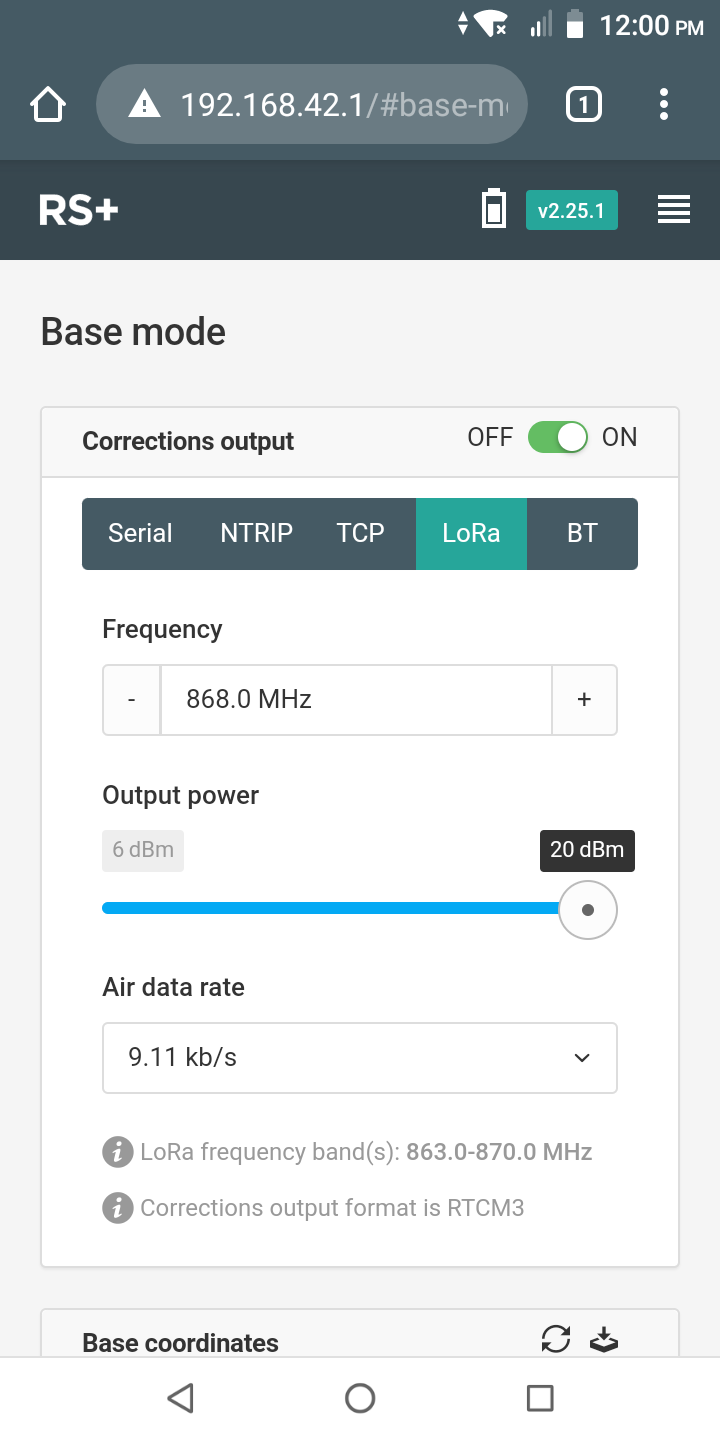
Thanks. At first glance it looks like frequency is set slightly different between rover and base, they are not the same. Please check.
Also, accumulations time for base coordinates, is it set and finished in single mode?
THANKS TB_RTK
It has worked. I noticed one of the frequencies was 868.0 while the other was 868.1 and changed that.
I will now look forward to field work
Excellent! Problem solved 
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.