Dan86
April 29, 2024, 12:38pm
1
Dear All,Is it possible to use Reach RS2+ base with Reach RS+ rover?
However, I am trying to set two Emlid receivers (Base=Rs2+; Rover= Rs+) for RTK using LoRa communication. Starting from my past experience with two Rs+ I am trying working in RTK mode via LoRa radio with the following settings.
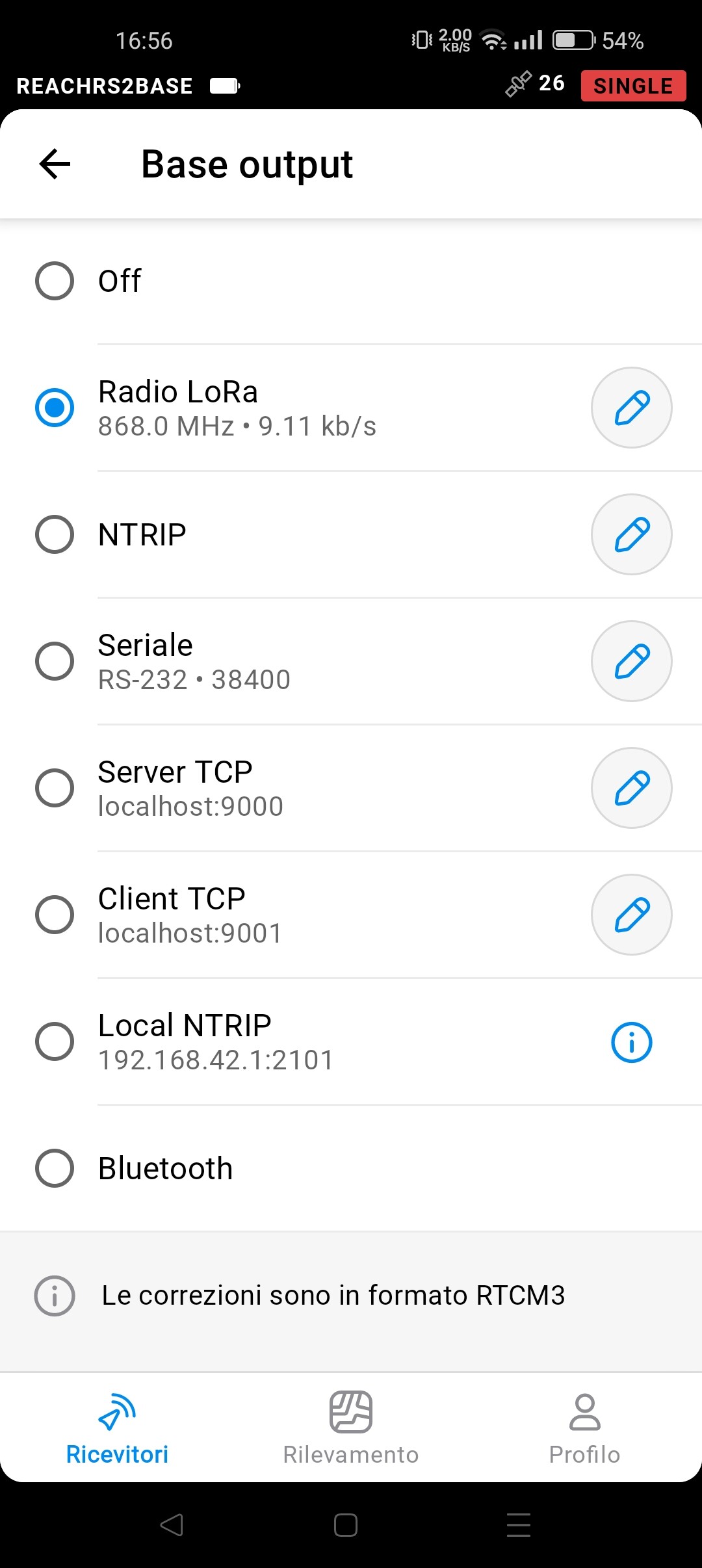
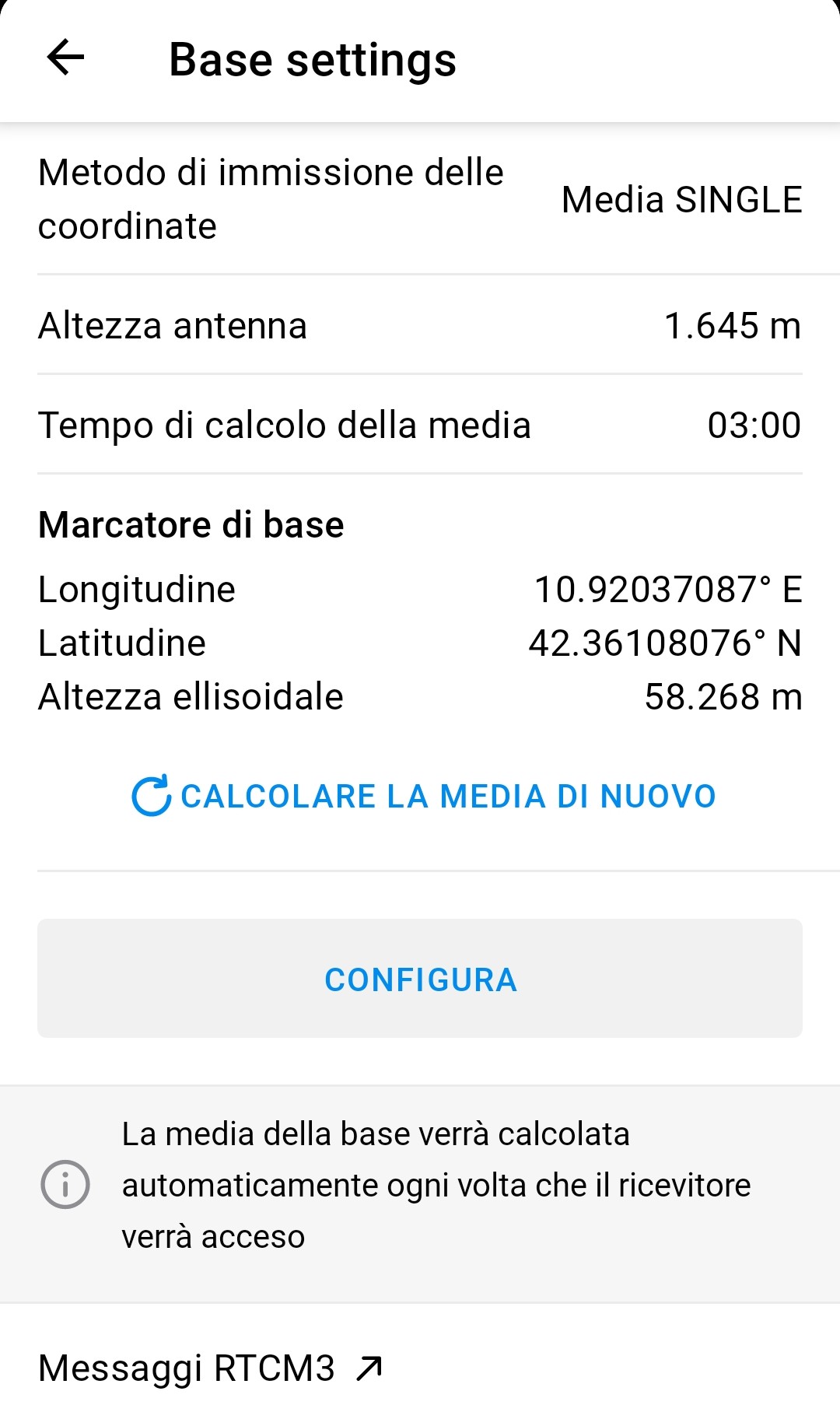
Base (Reach RS2+) settings:
Rover unit (Reach Rs+) settings:
Unfortunately, I can’t see any correction passing through the base to my rover unit, I suppose the problem was in RTCM messages since Reach RS2+ has different codes from Reach RS+.
Do you have some suggestions regarding what I am doing wrong?
Many thanks for your help.
Best regards
Has the base populated its cordinates yet , average single or manual?
Dan86
April 29, 2024, 2:18pm
3
Hi David,
try a different freqency above 900 , see if that helps
Dan86
April 29, 2024, 9:58pm
6
Unfortunately frequency above 870 Mhz are not allowed for LoRa
For more details and check some bad settings I am attaching simple reports of my units
Rover Reach rs+
Simple system report
app version: 31.8-r0
current_network:
ip: 192.168.42.1
security: wpa
ssid: ReachRover:54:B8
enabled: true
mode: hotspot
base_mode:
base_coordinates:
accumulation: 180
antenna_offset: 1.645
coordinates:
height: 49.68
latitude: 42.36954021
longitude: 10.91277315
mode: single-and-hold
output:
io_type: 'off'
settings:
lora:
air_rate: 9.11
frequency: 868000
output_power: 20
ntripcaster:
mount_point: REACH
password: '***'
port: 2101
username: reach
ntripsvr:
address: ''
mount_point: ''
password: '***'
port: -1
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: localhost
port: 9001
tcpsvr:
port: 9000
rtcm3_messages:
message_1002:
enabled: true
frequency: 1
message_1006:
enabled: true
frequency: 0.1
message_1010:
enabled: true
frequency: 0.5
message_1097:
enabled: true
frequency: 0.5
message_1107:
enabled: false
frequency: 1
message_1117:
enabled: false
frequency: 1
message_1127:
enabled: false
frequency: 0.5
bluetooth:
enabled: true
pairing:
discoverable: false
no_input_no_output: true
pin: '***'
correction_input:
base_corrections:
io_type: lora
settings:
bluetooth:
send_position_to_base: false
lora:
air_rate: 9.11
frequency: 868000
output_power: 20
send_position_to_base: false
ntripcli:
address: ''
mount_point: ''
password: '***'
port: -1
send_position_to_base: true
username: ''
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: false
tcpcli:
address: localhost
port: 10001
send_position_to_base: true
tcpsvr:
port: 10000
send_position_to_base: true
device:
power_on_bottom_connector: false
privacy_policy_accepted: true
role: null
rv3_banner_shown: true
usage_analysis_accepted: true
logging:
logs:
autostart: false
base:
enabled: true
format: RTCM3
raw:
enabled: true
format: UBX
rinex_options:
logging_interval: 1
marker_name: null
pole_height: null
preset: custom
satellite_systems:
beidou: false
galileo: false
glonass: true
gps: true
qzss: false
sbas: false
time_adjustments_enabled: false
solution:
enabled: true
format: LLH
started: false
settings:
interval: 24
overwrite: true
simultaneous_logging: false
position_output:
output1:
io_type: bluetooth
nmea_settings:
bluetooth:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
output2:
io_type: tcpsvr
nmea_settings:
bluetooth:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
positioning_settings:
elevation_mask_angle: 30
glonass_ar_mode: true
gnss_settings:
positioning_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: false
sbas: false
update_rate: 5
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 1
max_vertical_acceleration: 1
positioning_mode: kinematic
snr_mask: 35
Reach RS2+ base
Simple system report
app version: 31.8-r0
current_network:
ip: 192.168.42.1
security: wpa
ssid: ReachRS2Base:7E:4A
enabled: true
mode: hotspot
base_mode:
base_coordinates:
accumulation: 120
antenna_offset: 0
coordinates:
height: 0
latitude: 0
longitude: 0
mode: single-and-hold
output:
io_type: lora
settings:
lora:
air_rate: 9.11
frequency: 868000
output_power: 20
ntripcaster:
mount_point: REACH
password: '***'
port: 2101
username: reach
ntripsvr:
address: ''
mount_point: ''
password: '***'
port: -1
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: localhost
port: 9001
tcpsvr:
port: 9000
rtcm3_messages:
message_1004:
enabled: false
frequency: 1
message_1006:
enabled: true
frequency: 0.1
message_1008:
enabled: false
frequency: 0.1
message_1012:
enabled: false
frequency: 1
message_1033:
enabled: false
frequency: 0.1
message_1074:
enabled: true
frequency: 1
message_1084:
enabled: true
frequency: 0.5
message_1094:
enabled: true
frequency: 0.5
message_1124:
enabled: false
frequency: 0.5
message_1230:
enabled: true
frequency: 0.1
bluetooth:
enabled: true
pairing:
discoverable: false
no_input_no_output: true
pin: '***'
correction_input:
base_corrections:
io_type: 'off'
settings:
bluetooth:
send_position_to_base: false
lora:
air_rate: 9.11
frequency: 868000
output_power: 20
send_position_to_base: false
ntripcli:
address: ''
mount_point: ''
password: '***'
port: -1
send_position_to_base: true
username: ''
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: false
tcpcli:
address: localhost
port: 10001
send_position_to_base: true
tcpsvr:
port: 10000
send_position_to_base: true
device:
power_on_bottom_connector: false
privacy_policy_accepted: true
role: null
rv3_banner_shown: false
usage_analysis_accepted: true
logging:
logs:
autostart: false
base:
enabled: true
format: RTCM3
raw:
enabled: true
format: RINEX
rinex_options:
logging_interval: 0
marker_name: null
pole_height: null
preset: default
satellite_systems:
beidou: true
galileo: true
glonass: true
gps: true
qzss: true
sbas: false
time_adjustments_enabled: true
version: '3.03'
solution:
enabled: true
format: LLH
started: false
settings:
interval: 24
overwrite: true
simultaneous_logging: false
network:
tcp_over_modem: false
position_output:
output1:
io_type: 'off'
nmea_settings:
bluetooth:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
output2:
io_type: 'off'
nmea_settings:
bluetooth:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
positioning_settings:
elevation_mask_angle: 15
glonass_ar_mode: false
gnss_settings:
positioning_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: false
update_rate: 1
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 1
max_vertical_acceleration: 1
positioning_mode: kinematic
snr_mask: 35
sound:
mute: false
volume: 100
Hi Daniele,
I’ve checked the simple system reports. Thanks for sharing them!
Is there a chance that you configured your Reach RS+ as your base under Base settings ? The base’s coordinates seem to be tied to it and not to the Reach RS2+.
If so, let’s reconfigure the setup and check if you can establish the communication over LoRa this way.
Dan86
May 19, 2024, 8:52am
9
Dear Kornel,
Under 'base settings" of my reach rs+ unit I have set the following so let me know how if I should configure it differently.
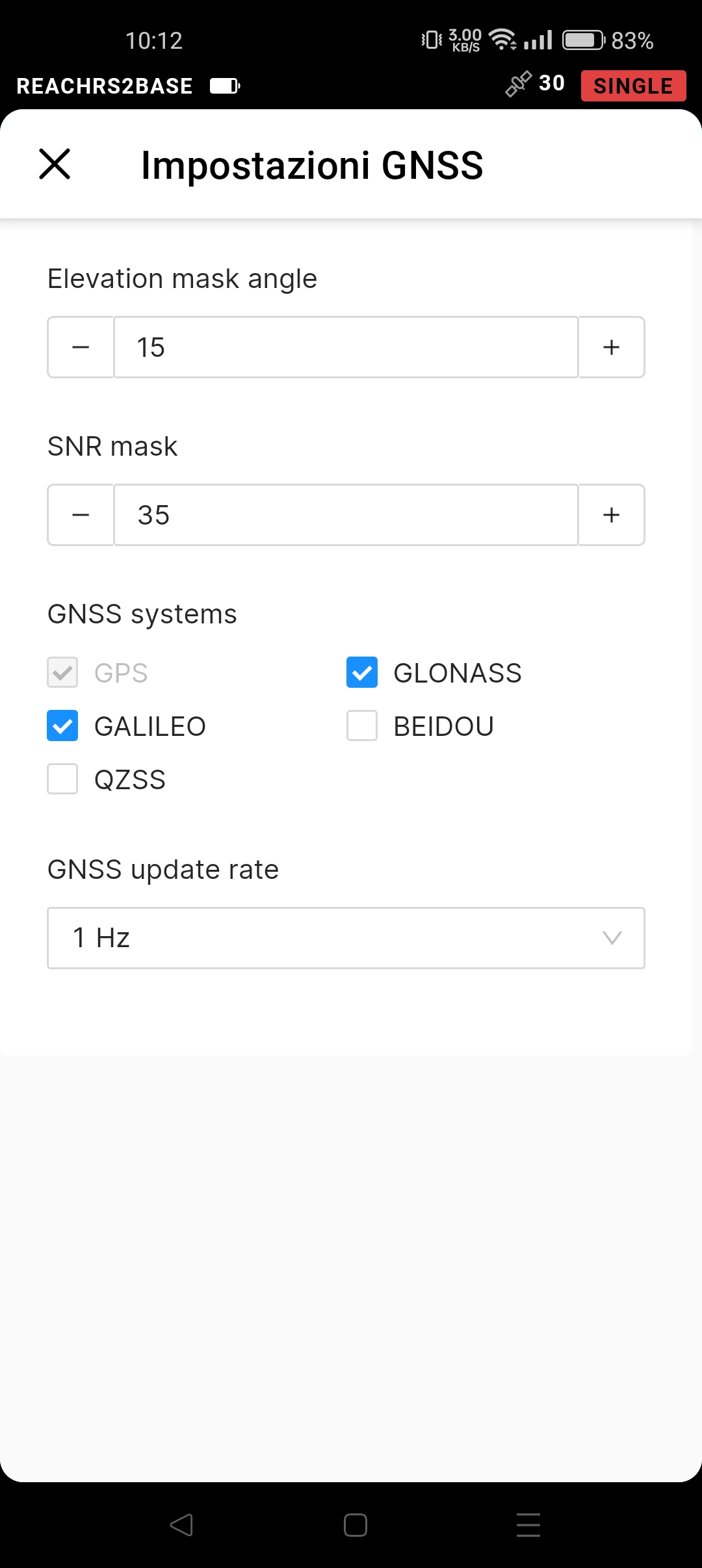
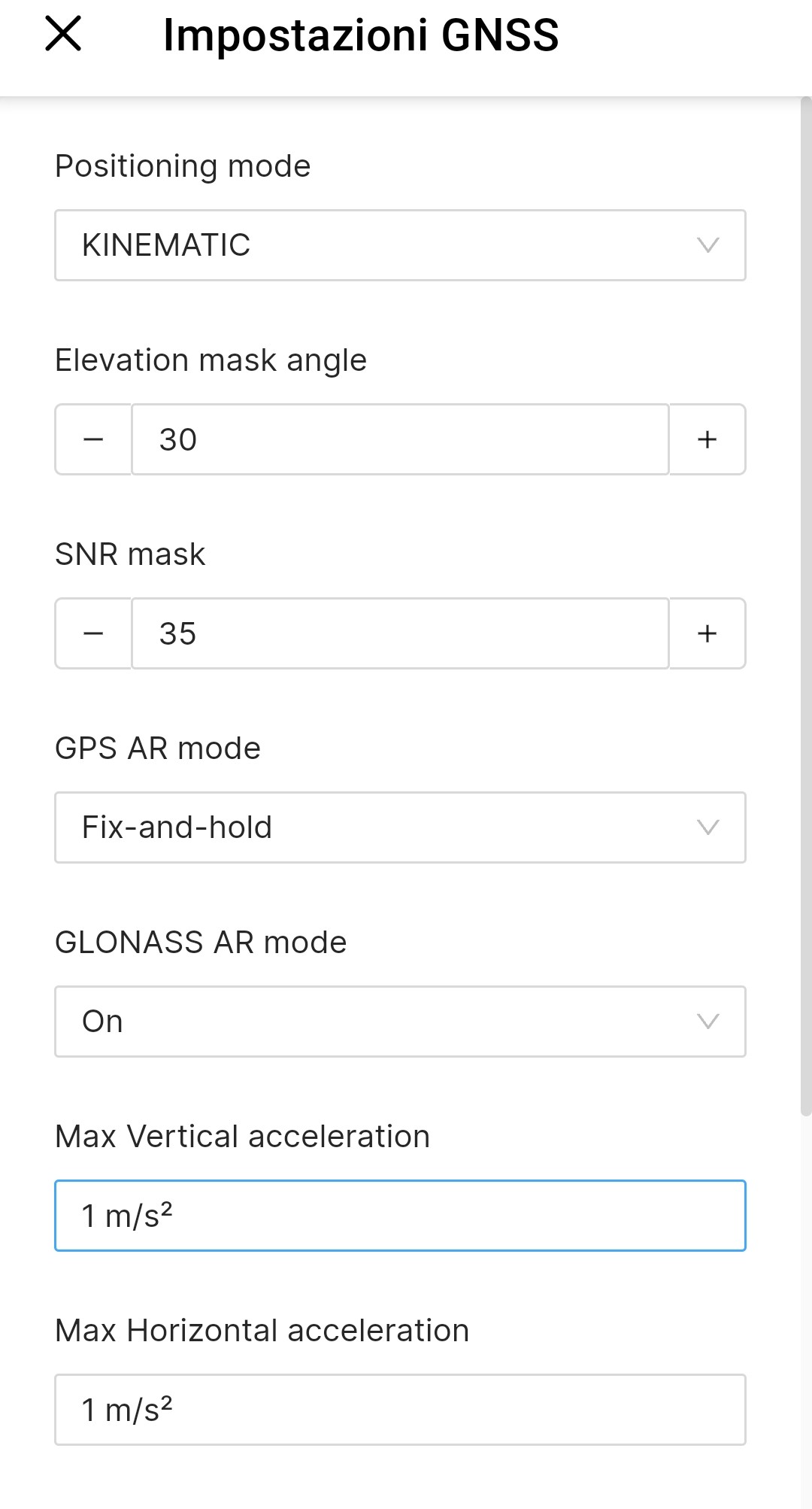
Whilst I noted that GNSS settings menu is a little bit different between ReachRs 2 Reach RS+. Conversely the Reach rs+ seems to have more options available but maybe I am missing something.
Reach rs 2
Reach Rs+
Dan86
May 19, 2024, 7:17pm
10
Hi Kornel,
Hi Daniele,
Thanks for the update! Good to hear that the setup is working fine.
Just one note: for Reach RS+, you don’t need to set anything under Base settings , as it’s now operating as a rover. It should be done only on the base’s side.
Single-band and multi-band units indeed have a bit different options under GNSS settings.