



I’m new to the Emlid / RTK world. I’m having trouble setting up my RS2+ as a base to send corrections to my Autel Evo Max 4T drone with a RTK module installed.
I was successful setting up the RS2 as a rover using my Emlid Caster Rover credentials in the base input settings but when I try to set the RS2 up as a base and send corrections to my drone I’m not successful.
When trying the base setup, I’m entering my Emlid Caster Base Mount Point credentials in the base output settings and then adding my Emlid Rover credentials to my Autel Explorer remote control RTK interface settings. My drone RC is saying that RTK is connected but its also giving me a warning that RTK is not ready (not receiving corrections). Both RS2 and Drone RC are connected to my home’s wifi internet connection (also tried my phone’s hotspot with not luck).
The only time I can get the RS2 to receive corrections is when I add the Emlid Caster Rover info to the base input settings. When using the base output settings (using the RS2 as base) what should the base input settings be set to?
Also, when I log onto Emlid Caster, it is showing my devices connected to my base and rover mount points when the RS2 NTRIP has the base credentials added and the Autel RTK interface has the Emlid NTRIP rover credentials added. Any help is very much appreciated.
Hi Steve.
If you have close proximity from your base to your Max controller have you tried using the Local NTRIP workflow?
On the linked page, scroll down to Set up Reach RS2/RS2+ as base using Local NTRIP
Thank you for responding. I have not tried Local NTRIP as my area does not have coverage. As I understand it, your Local NTRIP provider has to have coverage in your area for it to work. Correct? I’m currently using Emlid Caster.
Local NTRIP does not use any outside service. You connect your base directly to your drone controller by using a local network, like on your phone. It does not even need the phone to be connected to the internet for it to work. If your base is located right where you are operating the drone, then it is the superior method to receive corrections to the drone. Less things to go wrong.
I suggest you give it a try first if that is an option for you.
Dumb question but forgive me as I’m new to this, do I still use my Emlid Caster credentials for the Local NTRIP settings? The only difference then would be I’m not using the internet like I would be otherwise. Correct??
Also, another question if you are willing to helpme, if I use my RS2 as a base and use my caster base credentials in the output settings what do the input settings get set to? Off? And vice versa, if I use my RS2 as a rover and add my caster rover credentials to the input settings what do the output settings get set to? Off?
I really appreciate your help!
Hi Steve, welcome to the community, and always feel free to ask if you have any questions!
Do you put the base and the rover in an outdoor area with good satellite visibility?
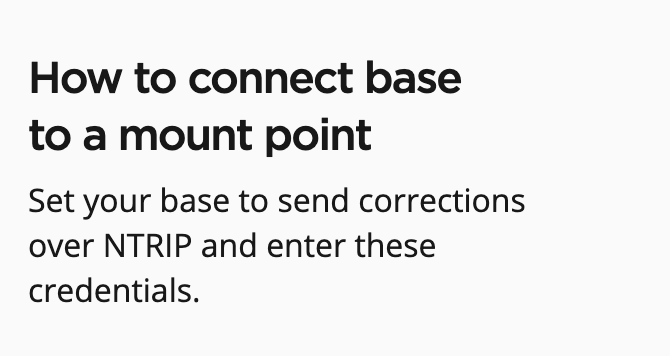
With Emlid Caster, for the base (Reach RS2,) you will need to input the credentials that shown below this part:
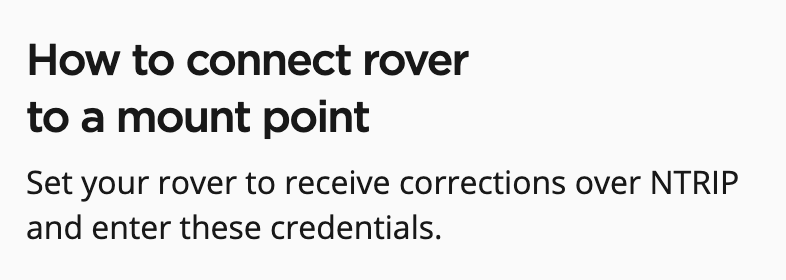
For the rover you will need to input the credentials that shown below this part:
Do you use Emlid Caster or Local NTRIP in this case?
You need to input the credentials as shown in the app. (please just look at the directions linked). They are different credentials than when using Emlid Caster.
When your base is configured on a known point, you do not receive corrections, so Correction Input is off.
Off is good.
I do set each up in an open area. I’ve only tried the Emlid Caster method and entered my caster base credentials in the output of the base and rover credentials in the drone. Both connecting to my phone’s hotspot. I’ve also tried using a Wi-Fi internet connection.
@steve3 I send you a private message to continue the troubleshooting.