



Successfully triggering the Reach with a Sony Qx1
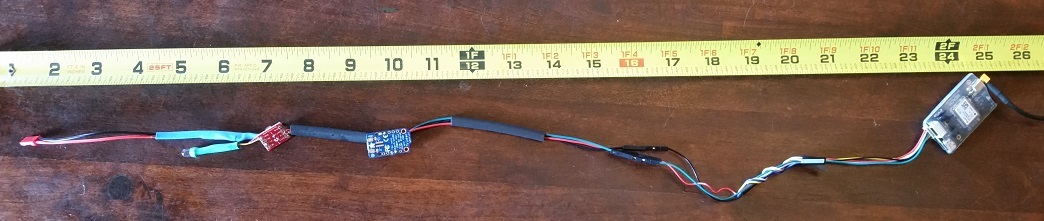
Test harness.
- Red plug coming from hacked Qx1 into Optoisolator.
- Input has a diode/led to eliminate the negative spike from the motor.
- Opto out to a MCU to digitally clean the signal into a one shot rise on for 50ms then off for 150ms before resetting. This limits any noise from the motor and internal cap discharging.
- Cable lengths adjust to installation.
Current test have 50 camera triggers and 50 time stamps.
1st test cable to be fitted into the solo.
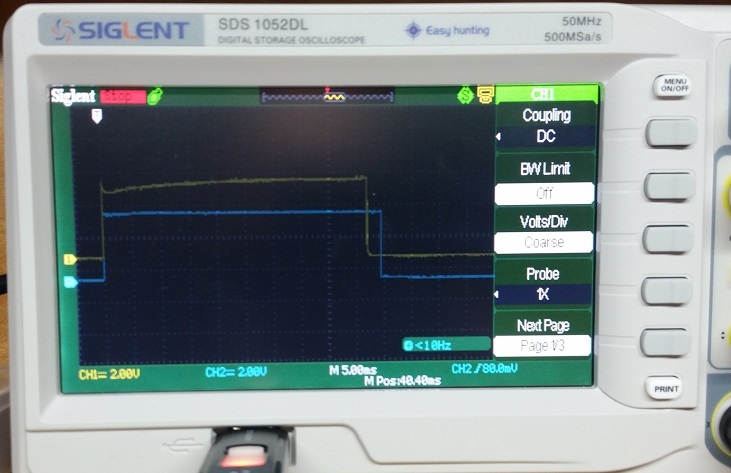
So now the signal is clean with no secondary spikes/triggers. The diode did also clean motor noise but still wasn’t good enough until adding the MCU.
The harness uses a LED out of a cheap flashlight, Sparkfun optoisolator pcb and a Adafruit Tinker 5v
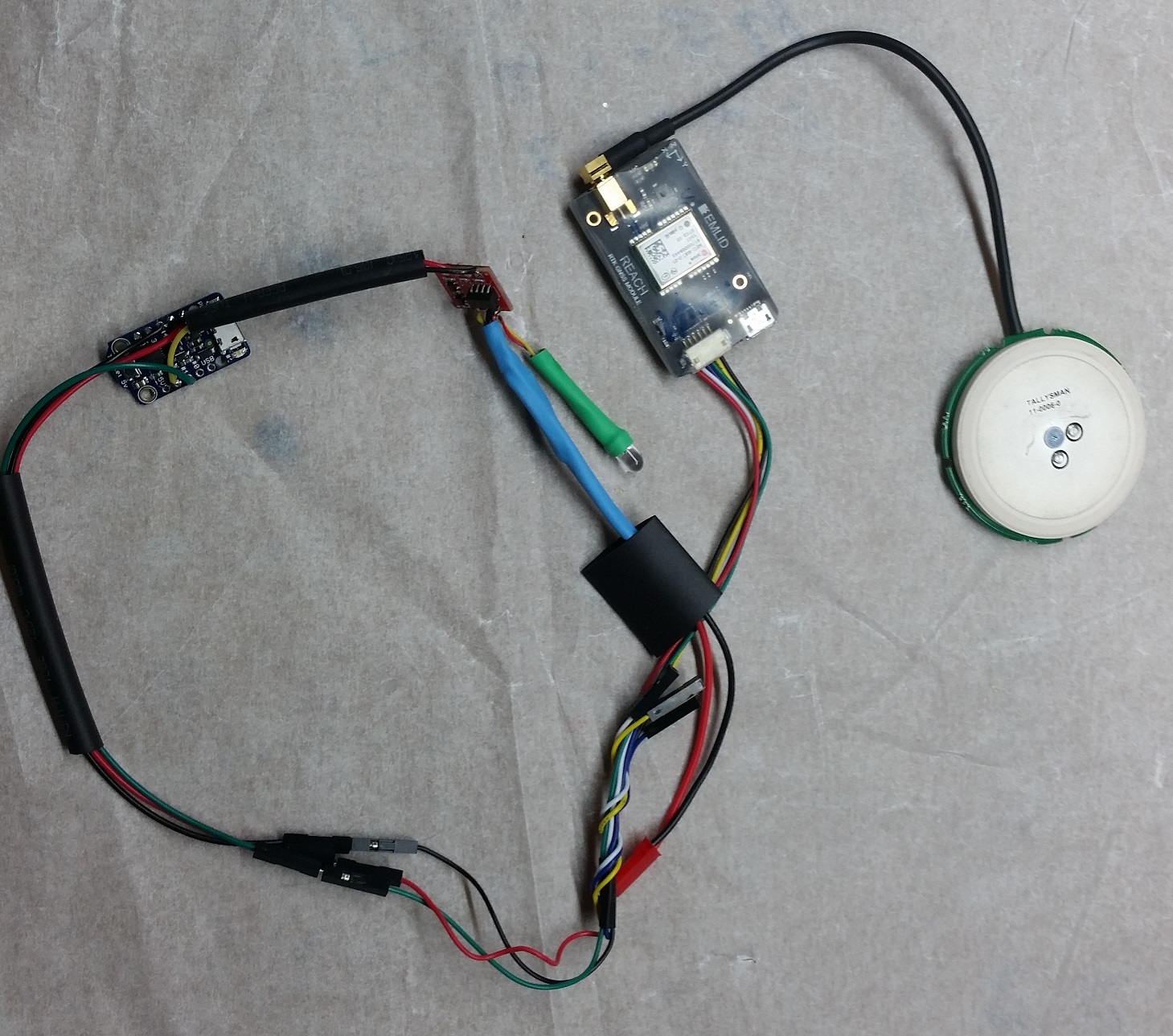
Here the wiring

I’m not sure how far I will go but thinking of creating a 3d printed box that would plug into and mount on the Solo accessory This would house the reach and harness components.
OK onto firing the Qx1 with the Solo and the wiring connection. Any time saving inputs much appreciated.
Burke