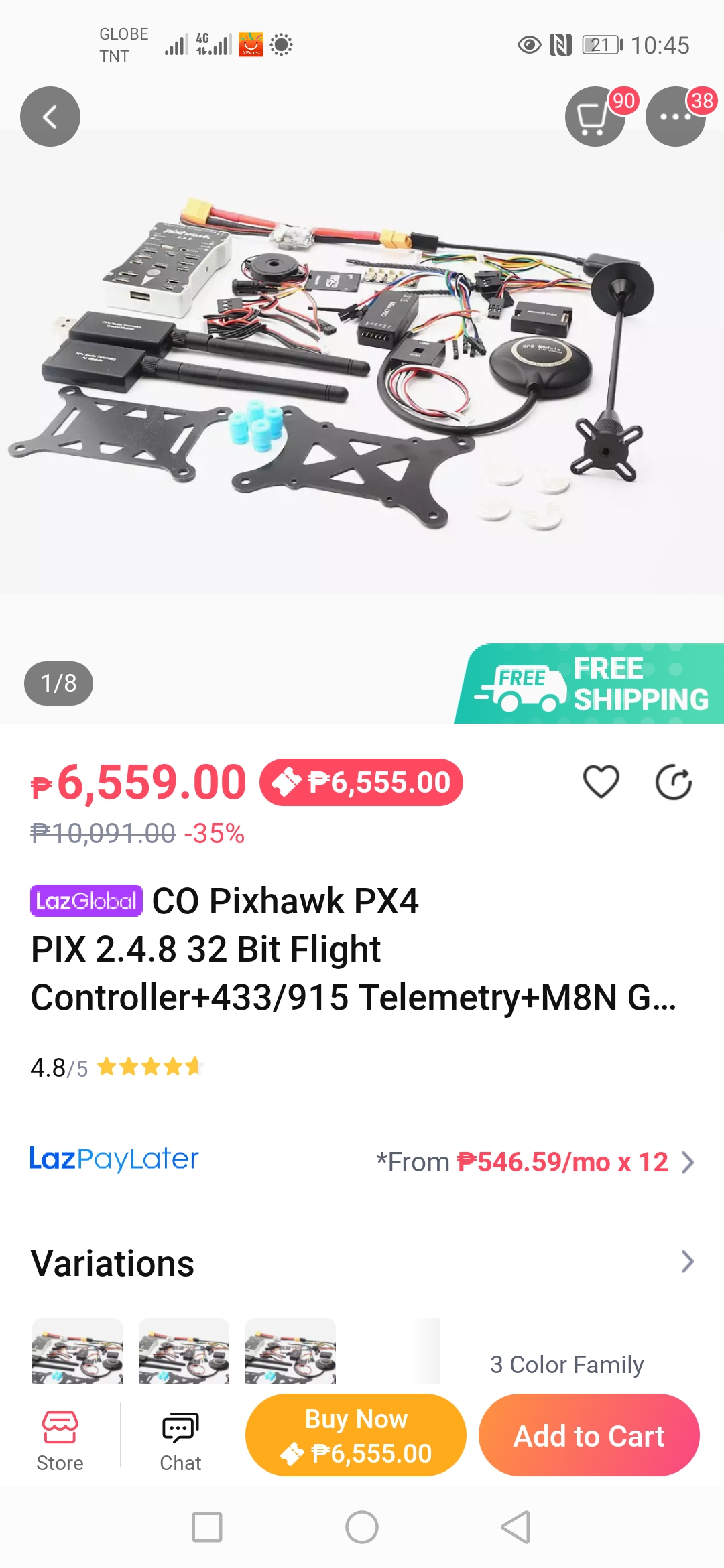
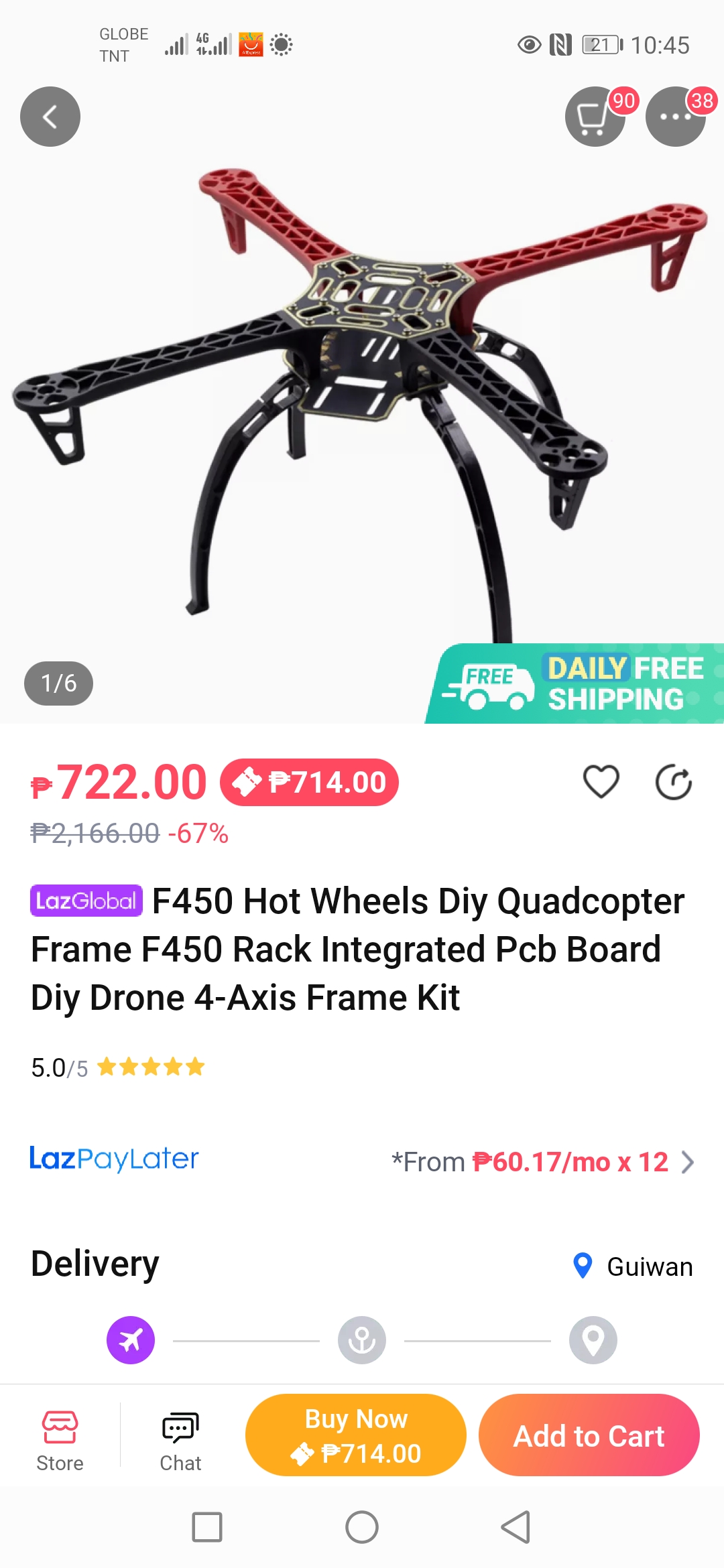
i have seen do it your self built of Drone in youtube with the use of pixhawk as flight controller.
my question is, is it posible to intergrate the reach m2 module on a pixhawk?
i have seen do it your self built of Drone in youtube with the use of pixhawk as flight controller.
my question is, is it posible to intergrate the reach m2 module on a pixhawk?
Hi Joseph,
Yes, it is possible. With PixHawk, M2 not only can be used for PPK mapping but for real-time navigation as well.
Building a drone is not an easy thing but it’s really exciting. If you decide to go ahead with that, keep us posted ![]()
the no. 2 is for stability of drone during navigation?
is it posible to intergrate the camera and m2 to pixhawk as one?
Yes, Pixhawk can be used to trigger the camera too (depending on model).
Joseph,
If you want to do the PPK mapping, you don’t need the 2nd option at all: it is mostly needed for use-cases where precise real-time navigation is required.
Such kits as the one on the screenshot you attached usually come with an onboard GPS module which accuracy should be enough for the survey flight.
Gabriel is right, PixHawk can trigger the camera. You can either configure it to take photos at waypoints or just at regular intervals.
Agree, but it I can greatly increase the precision of the height hold, as you are no longer depending upon sensor from 2 imprecise sources: barometer and on board gnss board/antenna.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.