



Yes. Precise or accurate GPS always need at least one baseline, i.e. two receivers recording in same time. And one receiver is on a known point.
Favorite geometric figure for a surveyor is a triangle, with 2 known points and three vectors to determine the new point. Then you have a closure in your figure and you can quantify your accuracy.
Currently, there exist several consolidated post-processing PPP services. On the contrary, real-time PPP systems are in an incipient development phase.
an excerpt from: http://www.navipedia.net/index.php/Precise_Point_Positioning
Understood.
I was reading this paper and saw that maybe we can get a good (centimetric) absolute base positioning with PPP, even with single-frequency (L1) equipment, like Reach. I saw that there are some topics here about it, and how to do it on RTKlib. I will test and come back with the results later.
One last question for now: does anybody knows why am I having the “Error: station pos computation” when I select “Average single position” on RTKpost (on the Base Station field). The processing only works when I use “Rinex Header Postion” in this field.
On unkown position with L1 and without external corrections 24h averaging and 24h to control, you could get good results.
On L1/L2 receiver. A comparison between L1 and L2 is made in the receiver to estimate ionosphere delay.
You could get better results with applying precise ephemeris and clock files from the IGS
Understood! Im going to make some tests and come back with the results later!
how about this as a test for the accuracy of the reach setup:
- go out and record 1-2 hours of raw data from the base reach (mark the location you placed the unit at)
- convert raw data to RINEX and use a PPP service to calculate the exact position of the base reach (edit: use this position in the settings of your base station -> base mode)
- go out to the marked location and place the base there again.
- run the setup again and this time pass the rover over the marked location of the base.
- plot and check whether the reported rover position was close to the exact position found in step 2.
Seems like a logical test for testing the accuracy of reach units?
also, a completely separate question, assuming i find an NTRIP broadcaster near me(within 25km?), how can this help me get a better position? how can i integrate this stream of ntrip into my system to get better results?
What do you mean. Better accuracy then <1cm? In relative to the base? or to absolute position?
absolute position.
@TB_RTK wait…what im saying sounds redundant right?
if i get the “accurate” position of my base unit using a PPP service, then the corrections sent from base to rover are acting like NTRIP anyways correct? so it wont make sense to get corrections from another ntrip provider?
@TB_RTK wait…what im saying sounds redundant right?Yeap. if i get the “accurate” position of my base unit using a PPP service, then the corrections sent from base to rover are acting like NTRIP anyways correct? Yes. so it wont make sense to get corrections from another ntrip provider?No, not in general
This is the idea, yes. The ideal cenario would be to have at least 5 GCPs with known absolut location around your survey área, so you could know If there isnt any deviation on the resulta, but 1 GCP (the one for the base) is the general ideia.
The only problem is correcting the base position via PPP. I’m trying some services, and till now I got a minimum base deviation of 2m (after PPP). I AM using the Survey Geodetic Location as the referente position. I suspect that this is because I stayed Just 10min with the base stationary. Will try more time today.
[quote=“rafael.lehmkuhl, post:32, topic:5554”]… I got a minimum base deviation of 2m (after PPP). I AM using the Survey Geodetic Location as the referente position.
[/quote]
Also consider these:
- the coordinate system for your reference point may not be lined up with the WGS84 coordinate system of GPS, or whatever your PPP service provides (needs transformation)
- the coordinate may be old and was not measured that accurately
- depending on your location, some parts of the world have a lot of continental drift each year. you may need to adjust it for drift (another transformation).
Hi,
Yes . Canadian PPP appears to plot L1L2 dual frequency Reference stations to centimenter level worldwide. It’s good to check tectonic plate drift over time.
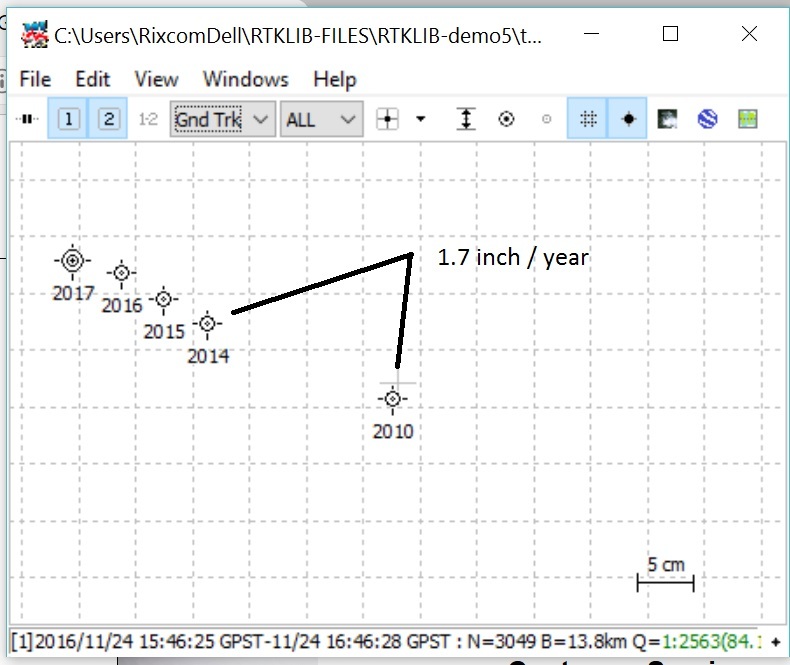
L1 only is not as precise, I believe. OK for Arctic Ice Drift. Kinetic ?? I think I would use PPP to verify local Base Station coordinates. Site logs appear to be out of date, so don’t use published GPS Base locations unless verified with OPUS, CAN PPP, or other PPP with survey date.
I’m not a Surveyor, so I’m having to double check everything. Once you have verified closest two CORS / Base stations to today’s survey date, then youshould be able to get close to cm/mm surveys in absolute location.
MAPS are a different problem. They will almost always be in error, in my opinion. That is why a local reference marker on your property is best if you want to be precise in absolute location.
It’s most likely that here in California, USA that we will slide NW of many CORS stations during the next earthquake.
Google Earth has a new feature to look at your location over the years to see changes in roads, construction, etc. Although this is a nice feature, (it shows considerable improvement in map resolution and improved accuracy) it also shows my GPS track ( cm-dm relative to 15km Base) varying from about 5 m to right of right lane to 15-20m to left of opposite side of 4 lane road over the years. Mmmm - not so good. (Note: the maps are from many different sources.)
My feeling is that if you want better absolute position, you need an on site marker surveyed with the STATIC mode fixed to your nearest Base Station.
Rick
1 Like
Good news: 5cm planimetric absolute error!
I downloaded the .OBS and .NAV from a reference base station (from IBGE, a geographic institute here in Brazil), and used them to correct the position of my Reach Base Station, via RTKLib on PPP Static Mode (how to do here). After that, I made the PPK post processing of my Reach Rover, based on my Reach Base data, via RTKPost, but using the corrected position of my Reach Base (for that, I simpy took the PPP corrected position and inserted it on the Base Station field, on RTKPost/Options/Positions/BaseStation/LatLonHeight).
I was able to get 5cm planimetric (XY) error. This was based on the deviation from the Geodetic Mark location that I surveyed with the Reach Rover unit. Nice result, especially considering that my base was there for no more than 15 minutes.
Thank you very much for helping me!
6 Likes
I’m also having same error. How to improve the absolute accuracy of the base?