Hi
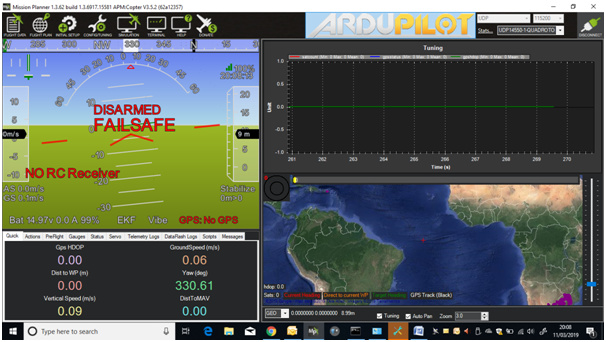
Mission Planner is showing No GPS, and gpsstatus, gpshdo & satcount are all zero on the Tuning graph.
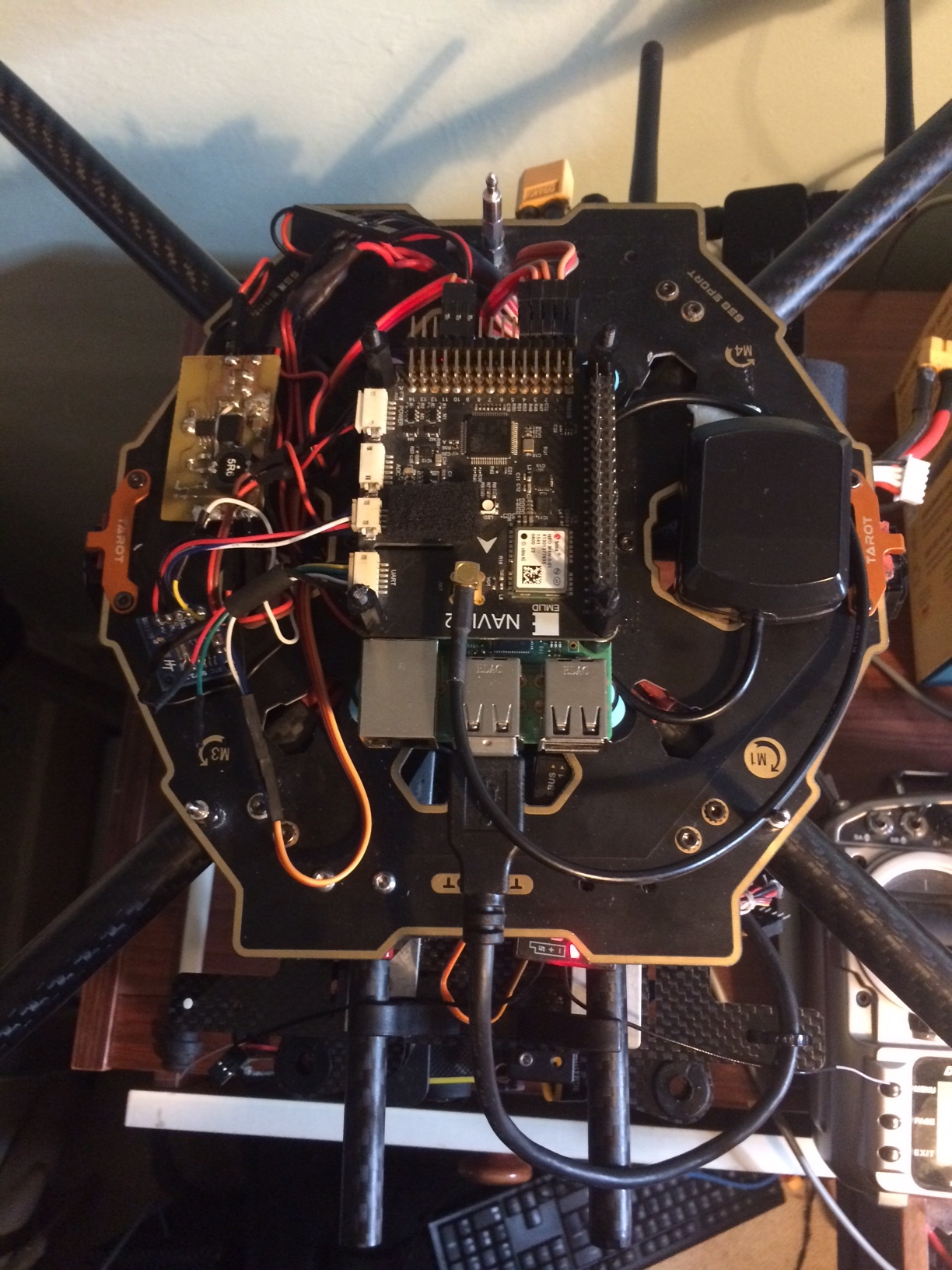
I have run the GPS.py example on the RPi, and that gives a 3D fix, and a correct location. The device, antenna, and SPI therefore all seem to be OK.
I’m really not sure where to look next. Any help appreciated.
Navio2. Arducopter 3.5.2-2.0 (according to dpkg)
Linux 4.9.45-94f47ec-emlid-v7+
The copter has been on the bench for a few months while I’ve been experimenting with a gimbal, Mavlink and Dronekit. I wouldn’t have expected any of this to have impacted the GPS.
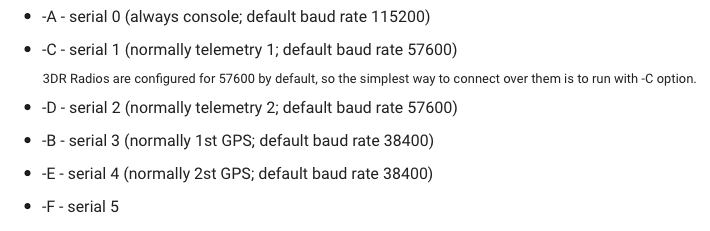
The problem was that I had disabled SERIAL3_PROTOCOL (as well as 4 and 5) because I was not using them - I thought. All working normally now.
So it appears that SERIAL3_PROTOCOL needs to be defined as a GPS in order for the internal GPS to work, even though there is no arducopter -B option specified on startup. The SERIAL3_BAUD parameter presumably is ignored as the GPS is connected via SPI rather than a serial link.