I’m trying to run PX4 on the RPi+Navio2 and everything is working so far except of the GPS.
I’m using the latest rasbian image (stretch) recommended on the raspberry configuration emlid-website.
I’m also using the latest PX4/Firmware found on (GitHub - PX4/PX4-Autopilot: PX4 Autopilot Software).
Command “ls -l /dev/spi*” in Rpi console results in the following:
pi@px4navio:~ $ ls -l /dev/spi*
crw-rw---- 1 root spi 153, 2 May 15 12:01 /dev/spidev0.0
crw-rw---- 1 root spi 153, 3 May 15 12:01 /dev/spidev0.1
crw-rw---- 1 root spi 153, 1 May 15 12:01 /dev/spidev0.2
crw-rw---- 1 root spi 153, 0 May 15 12:01 /dev/spidev0.3
This is how GPS is started in px4.config (i tested all spi ports from 0.0 to 0.3):
gps start -d /dev/spidev0.0 -i spi -p ubx
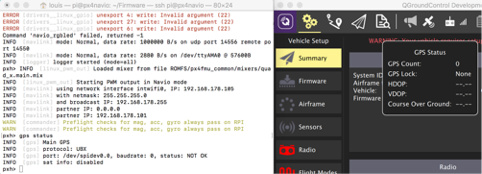
entering “gps status” in PX4 shell gives the following:
pxh> gps status
INFO [gps] Main GPS
INFO [gps] protocol: UBX
INFO [gps] port: /dev/spidev0.0, baudrate: 0, status: NOT OK
INFO [gps] sat info: disabled
This is a screenshot from the gps status and the qgroundcontrol not finding any satellite. I used the Emlid GPS Antenna and went outside to test it.
Reach uses ERB protocol. That protocol is supported by ArduCopter, but probably not by PX4.
Try using arduCopter to see if the electrical connection works and if the GPS is detected. You can use QGround control to download the arducopter FW.
If that one works then switch to PX4 and maybe use the open source arduPilot ERB device driver as a starting point in writing a PX4 ERB device driver
With ArduCopter it detects GPS. Now with PX4 I am pretty lost.
First I’ll have to learn how to install a driver in PX4… And than maybe I’ll find someone who had the same issue.
I’ve gotten some help from the PX4 side.
With Stretch GPS is not running on the Raspberry Pi Model 3 B.
However with Jessie (older Debian image) it is running.
Now the EKF2 is still not running but anyway I wanted to share the GPS fix.