Hi, I did a experiment using 2 Reach RS+. One for base, and one for rover.
The date (latitude and longitude) of base is very accurate after I putted it on the ground about 30 min. And base also connected to Virtual Reference Stations in my country.
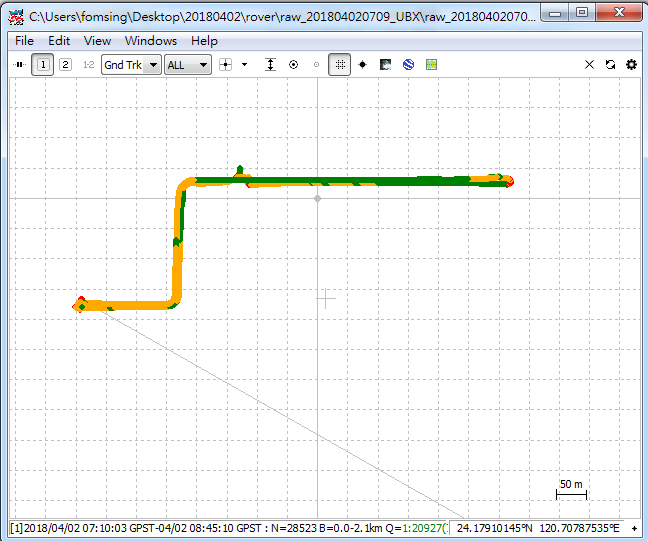
And then I walked about 500 meters away from base with the rover and stopped for about 30 minutes.
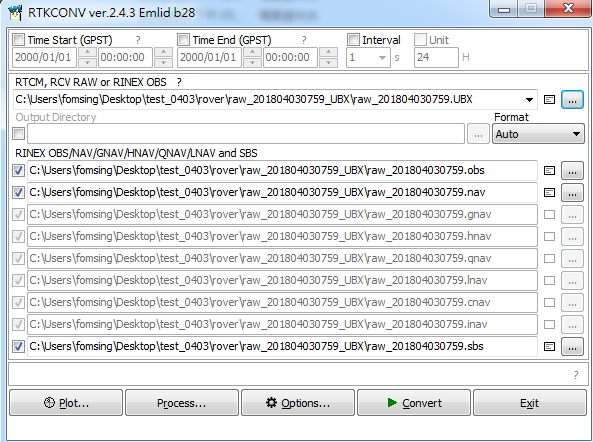
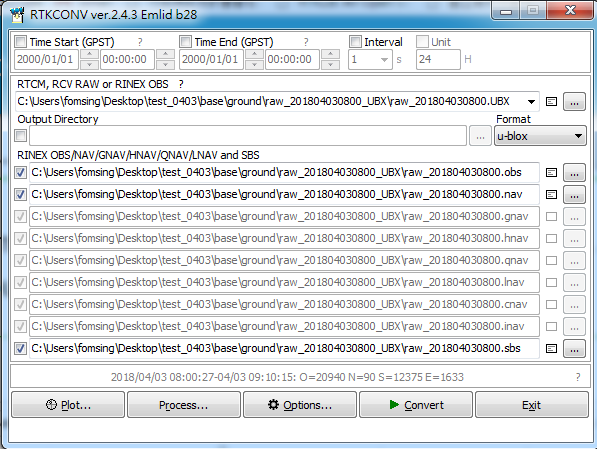
The question is when I do GPS post-processing following the tutorial:
If you open up your rover’s position file with a text editor and look around line 22. Does the reference position contain the correct coordinate for your base location?
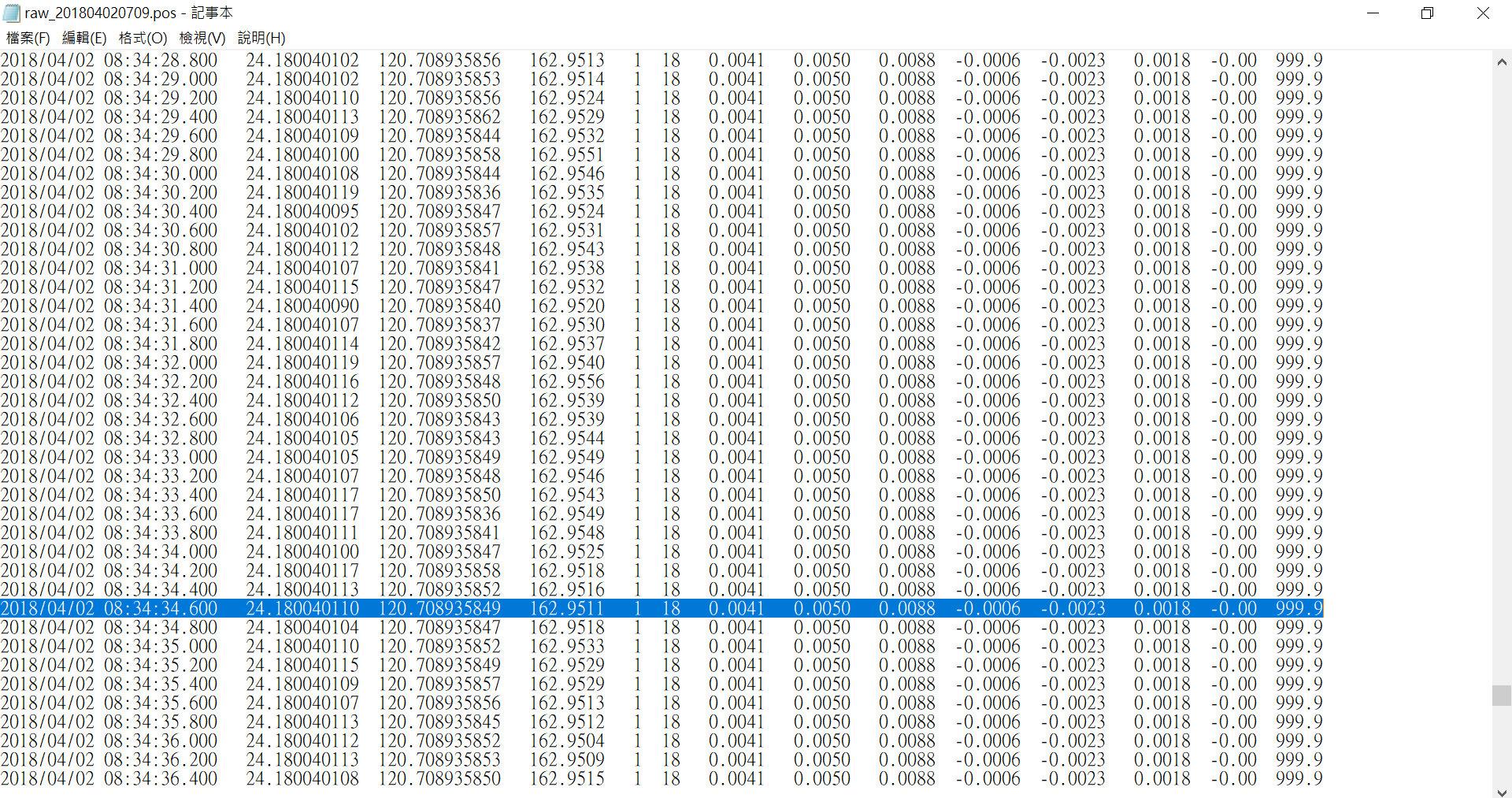
I saw the rover’s position file.
The reference position is ( 24.178301935 120.702315343 ). It is not right location of base.
My base location is about ( 24.178270316 120.702295872 ).
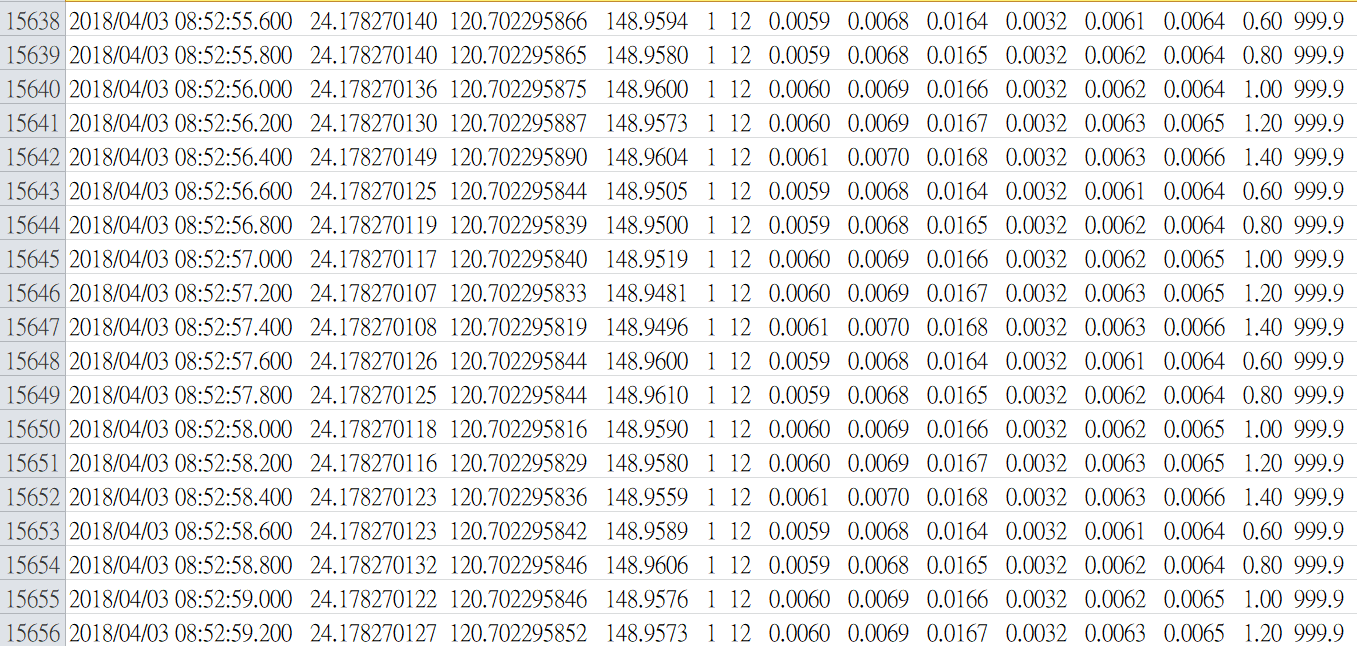
The following is base solution (.LLH).
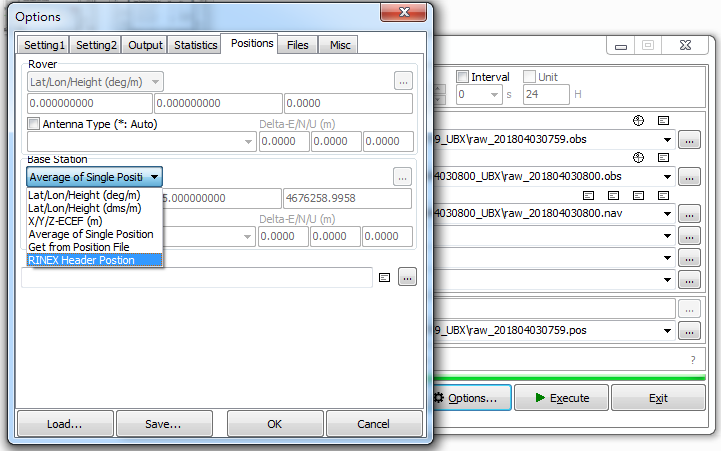
And in the last step, I choose two kinds of buttons. “Average of Single Position” and “RINEX Header Position”. But both of them are all wrong (reference position of result is wrong).
I am gassing if the position of base is unstable in the beginning, so the result is wrong after calculating.
Hello!
As Ì understand it,
“Average of singe positions” should be an average over all the positions in the base station log file (using whatever correction the base is receiving - often none).
“RINEX Header Position” is the the last known position - again using any available correction to the base - or none if none is available).
If you know the position of the base, you should enter it manually using “Lat/Lon/Height” or “X/Y/Z-ECEF”.
THX for reply~
I think because the error of “Average of singe positions” is too much. And the last known position of “RINEX Header Position” is a wrong position.
I will try “Lat/Lon/Height” by choosing a set of good numbers in .pos file.