I am processing ppk data sets with RTKLIB, in my drone mount the antenna is perfectly aligned with the sensor of the drone camera in the X and Y axis, not being so with the Z axis.
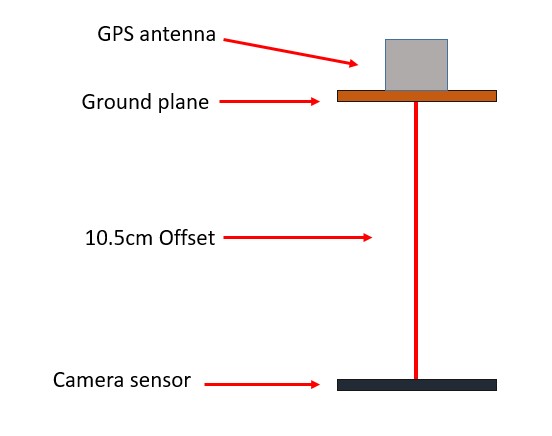
In this case the offset between the sensor of the drone camera is 10.5cm between the ground plane and the sensor.
When introducing this offset in RTKLIB you have to put a value of 0.105m but my doubt is if it has to be in negative value (I thought so, since the sensor is below the antenna) (-0.105m) or it should be positive (0.105m) since I was getting bad results with negative value and curiously when introducing the positive value they have improved almost to perfection.
Positive is up and negative is down. The antenna is up from the camera senseor so yes it is a positive number. You say the antenna is centered horizontally, but is that at a resting state? If so then how are you calculating for the tilt of the aircraft and where that then puts the relationship. It will affect the y-axis as well if you wanted to scrutinize. Think about this…
You got it! The reason I asked about GCP’s is because then it really doesn’t matter. The increased relative accuracy of the points is the benefit and then the GCP’s put everything where it is supposed to be.