palacita
March 3, 2016, 3:25pm
1
Hi Community,
I have still an GPS and Baro problem with NAVIO+
flashed with http://docs.emlid.com/navio/Downloads/Real-time-Linux-RPi2/
use sudo ArduCopter-quad -C /dev/ttyAMA0
setup at MP with
G_GNSS_MODE 64 (default 0)
this enables GPS, SBAS, GLONASS you might have to change that, depending on where you live.
GPS_SBAS_MODE 1 (default 0)
GPS_TYPE 2 (default 1)
from Navio+/2 GPS problems (hopefully) solved
But still have those problem, several times calibrate accel but still bad baro health.
Your advice and help are needed
Thanks
Can you share more details about your setup? Is baro working at all?
palacita
March 4, 2016, 1:17am
3
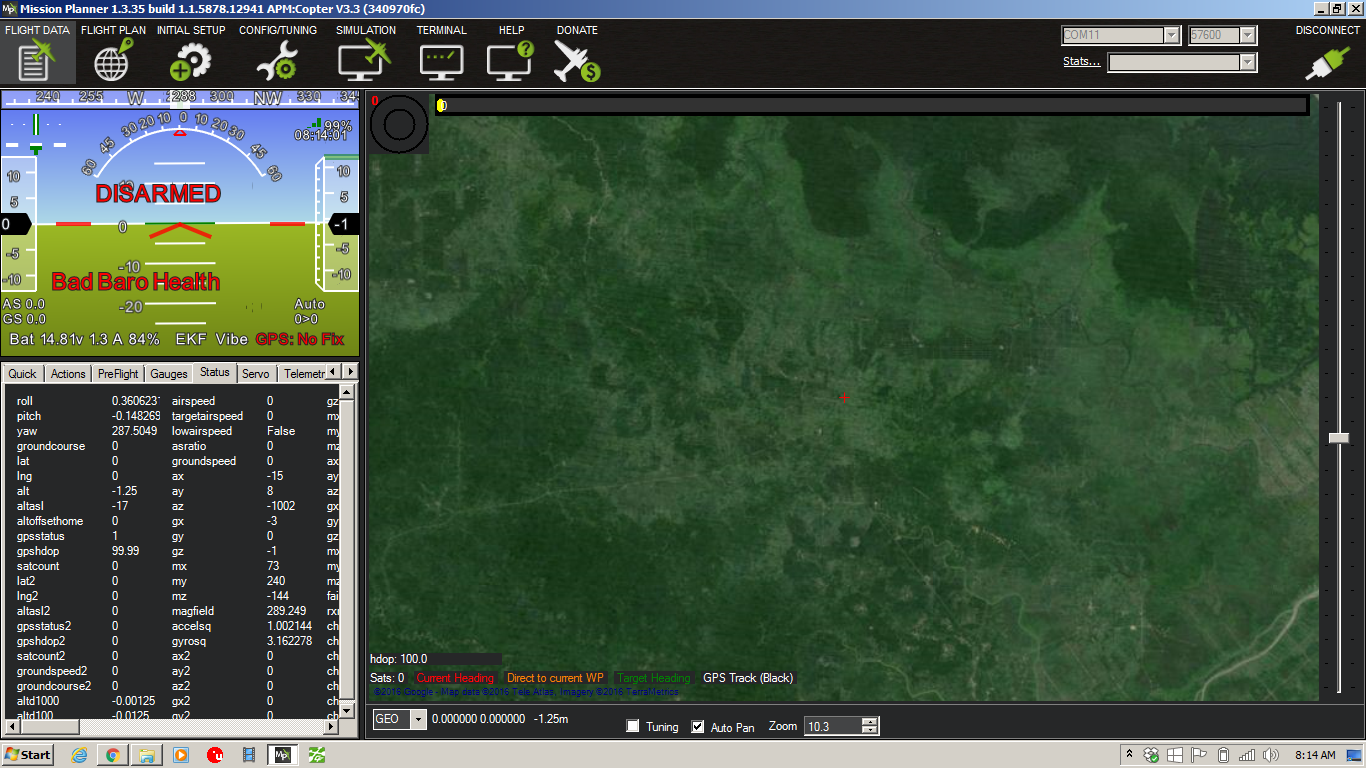
Here is the screenshot of MP
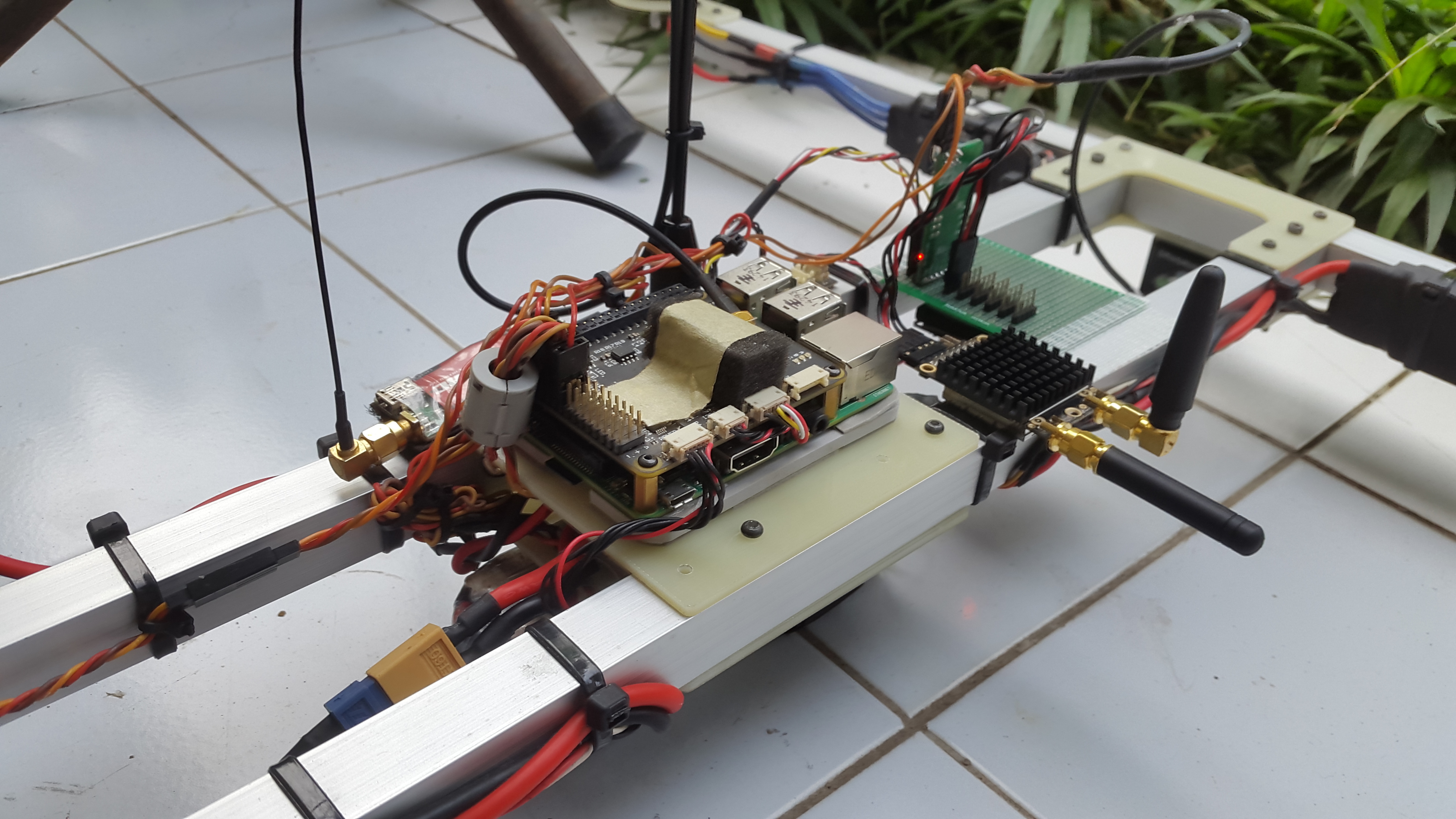
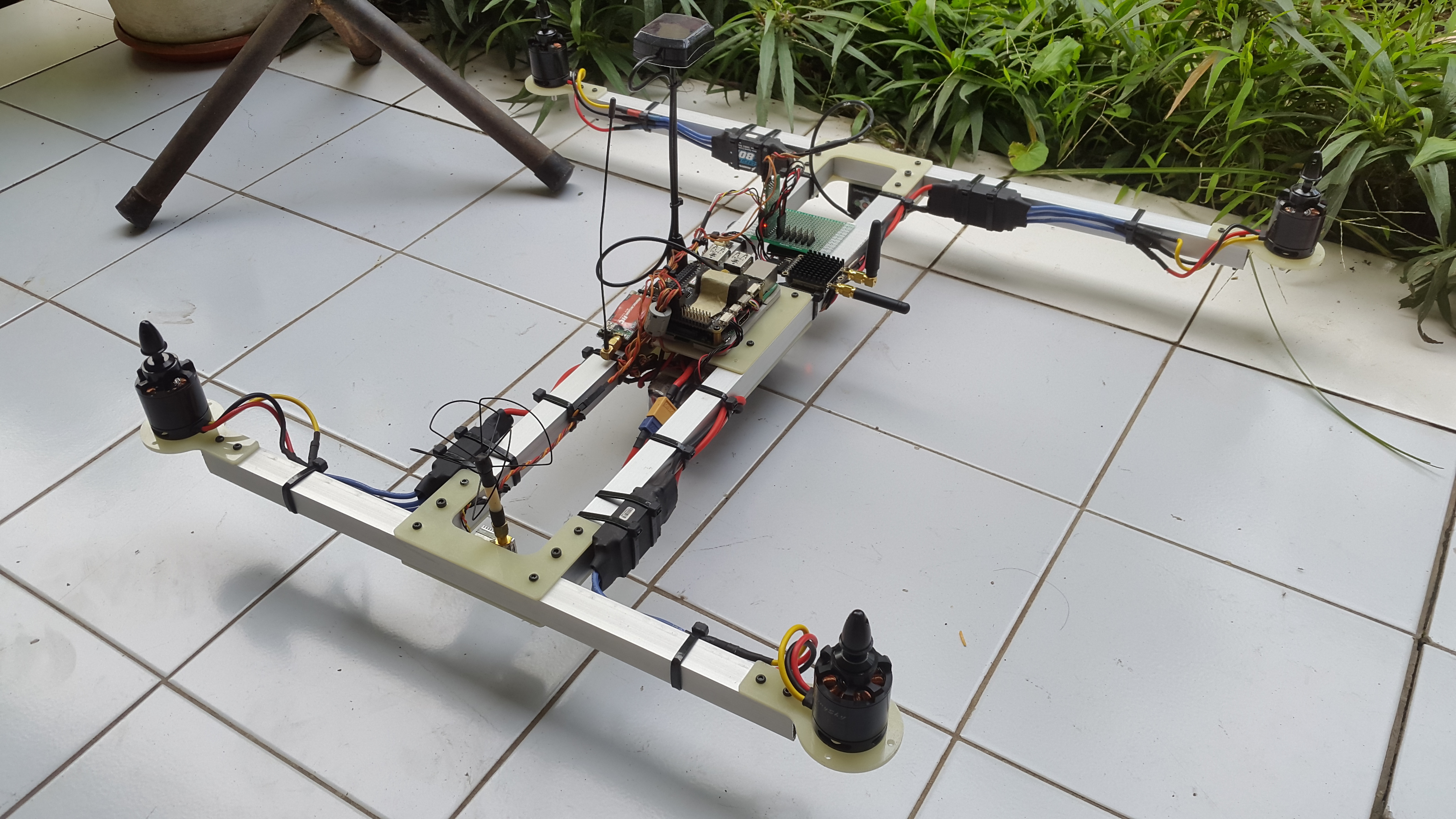
This is my quad
Any suggestion on check the baro? Do I need like at http://docs.emlid.com/navio/Navio-dev/ms5611-barometer/ ?
Thanks
palacita
March 4, 2016, 3:35am
4
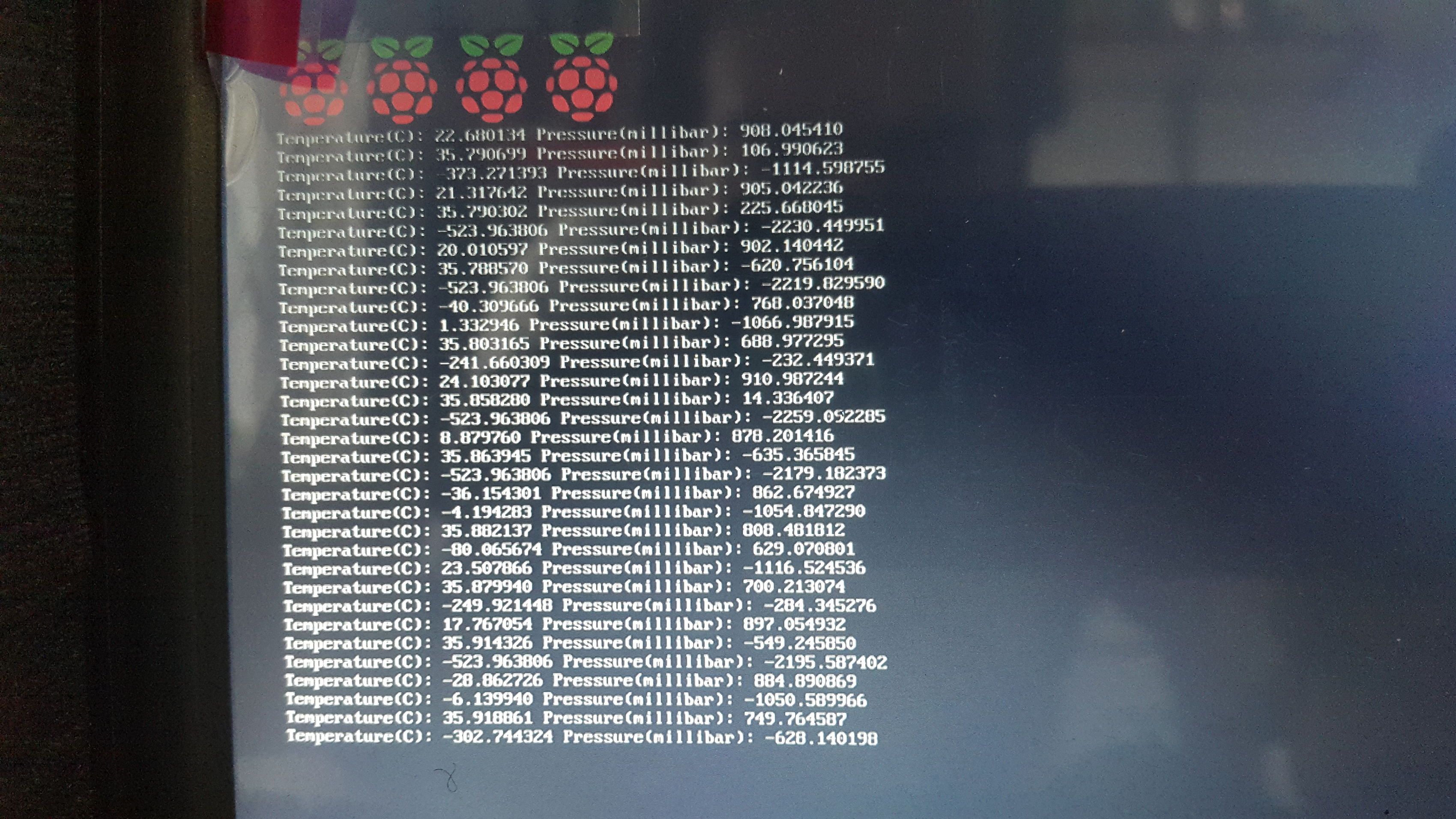
Barometer test
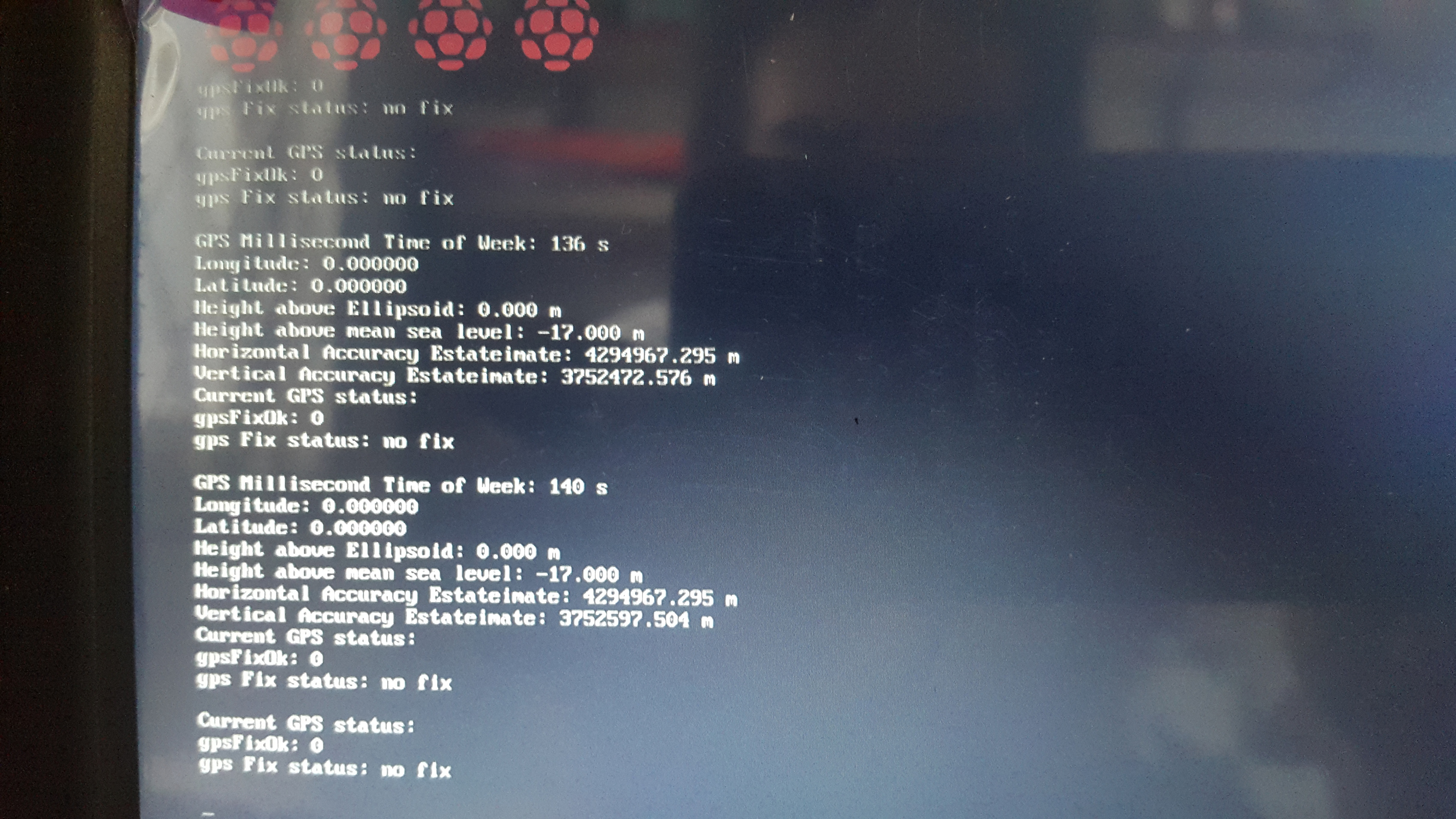
GPS test
My quad are outside the room with clear view of the sky.
palacita
March 4, 2016, 3:43am
5
I also attach PX4Flow and it doesn’t send or receive any data…
Can you try with all external i2c devices disconnected first?
palacita
March 4, 2016, 5:19pm
7
Yes I have try it, try only raspi navio+ gps powered from PM but still the same
Johar, baro test looks really suspicious. can you try to SSH into the Rpi, instead of using GUI and run the test again? Also, please do not run tests and APM at the same time.