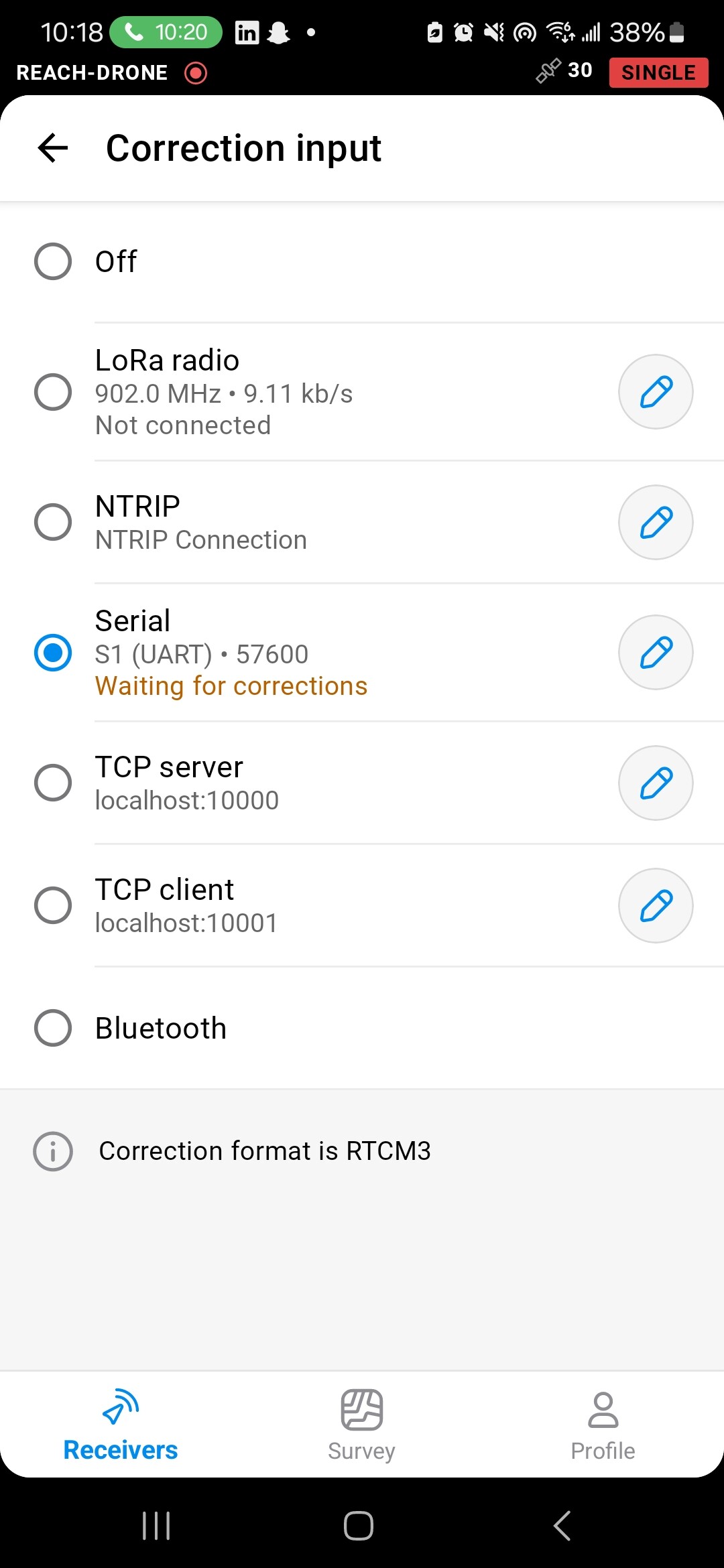
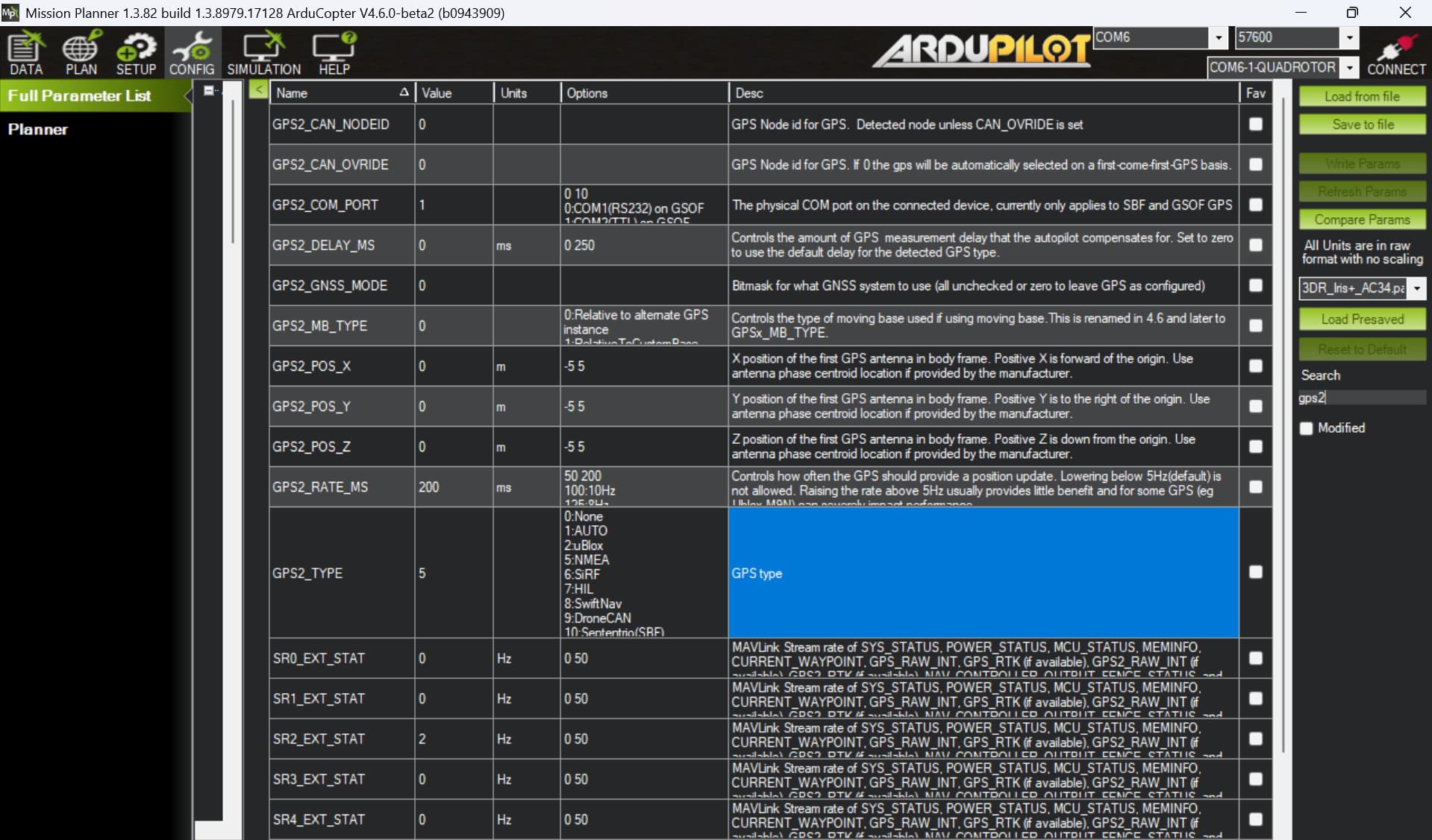
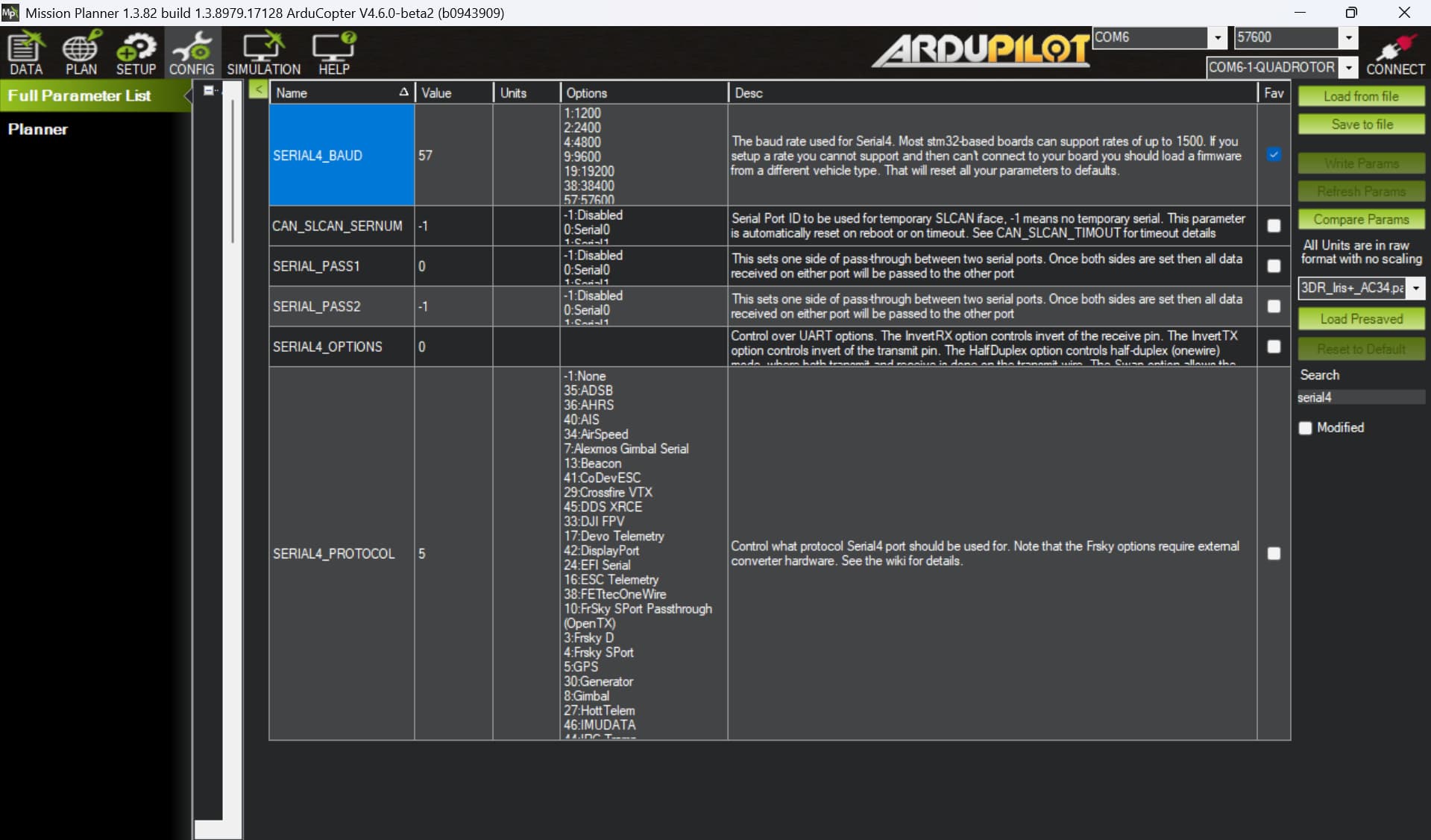
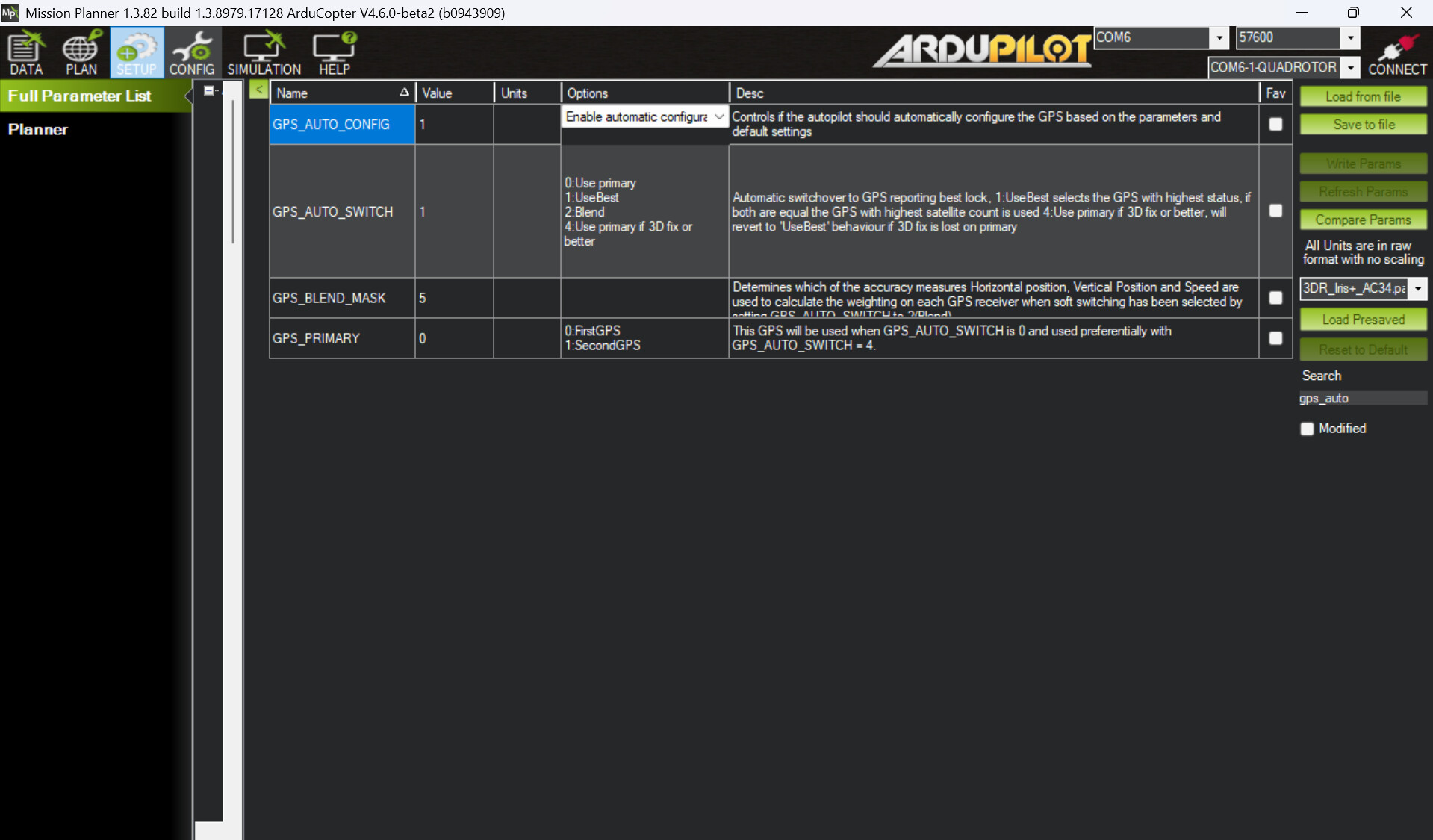
Sorry for the long response, but I just got around to test flying the drone with RTK enabled. Before taking off, it sends a pre arm error message: “GPS2 not found” and “GPS 2 still configuring this GPS.” See the video for the full setup and what is going on. Also, see the screenshots for all of my parameters set on the drone. I’m not sure what’s happening here because all of the parameters are correct and I’m receiving corrections via NTRIP from my NTRIP provider. It just seems like the drone isnt reading them somehow. Anyone got any ideas?
Thanks for all the details. I looked up the error “GPS x still configuring this GPS.” It can mean the setup isn’t fully complete.
From your video, I see only the orange LED on, which suggests it’s not getting enough power. As discussed earlier, you need to cut the +5V wire to power the M2 safely. Then, connect it to an external power source via the micro-USB port or the S1/S2 port.
How are you powering the M2 now? What power source are you using, and does it provide 5V?
The +5V wire is cut, I haven’t changed anything since the last issue was solved with the power. It still gets 5V. It receives connections just fine also so I don’t think it’s a power issue anymore. Also, the original GPS was blinking an orange color and beeping, which means that something is not configured right in the GPS settings causing it to get confused.
When the M2 gets enough power, all the LEDs should light up. However, since the red LED is the only one on, we need to start by addressing this power issue.
As I recall, you resolved this last time by powering the M2 via USB from your laptop. Since the M2 is now outdoors and on the drone, could you share what power source you’re using at the moment? If possible, some photos of how it’s set up would help us understand the situation better.
I have 24V coming out of the PDB (power distribution board) into a 24V to 5V converter. Then, from that converter, it goes straight into the Emlid M2, which seems to power it just fine from the video. I don’t think its a power problem because the only time that the orange light comes on is after I tell it to resume mission. Any time before that, the blue and green lights are on.
It seems to me like the module itself is faulty. I have heard a lot of people say they arent the best to integrate with Mission Planner. It gets 5V and I know that for a fact. Its not a coincidence that every time I try to send the drone up, it says GPS 2 not found.
Even in a simulation where there is no power being used, the Emlid is still messing up.
Have you tried using the M2 as a stand alone receiver using a dedicated power source ? Emlid may want you to log raw data as well as a system report. If there’s anything wrong with it, Emlid will know from the data.
I know you reiterated the your power source, but it sounds like it’s not getting adequate power. Your issue kinda sounds like when I first started using mine as a static receiver, the power source wasn’t putting out enough amperage. I changed my power bank and it’s been fine since . Maybe it’s a cable issue ?
Electrical
Power supply voltage on USB
or JST-GH connectors: 4.75 - 5.5 V
Thanks for the videos! Your M2 powers up properly during the initial setup. All LEDs are on, so it’s getting enough power at that moment. In the second video, though, it looks like it’s not receiving enough power from the laptop again. As Bryan mentioned, this could be related to the cable.
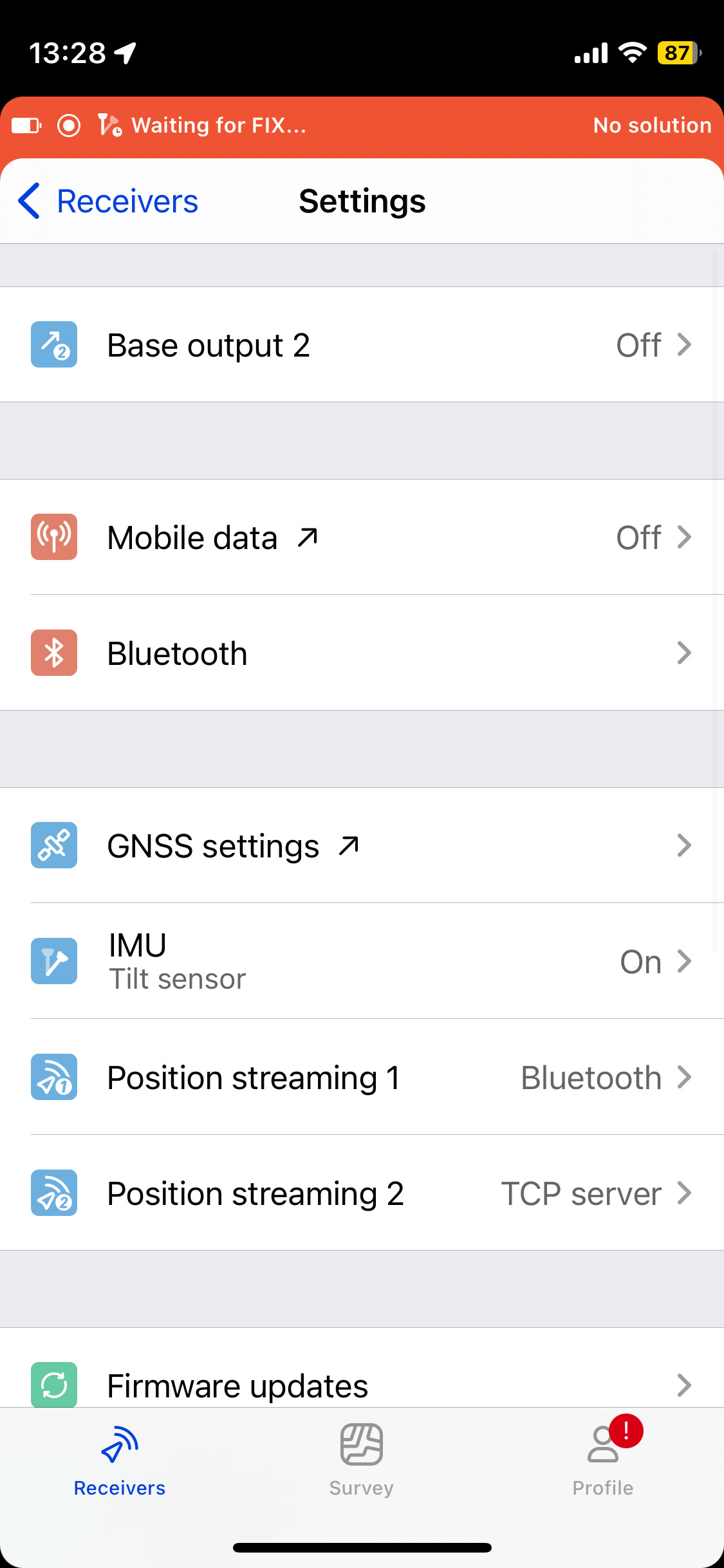
Am I right you’ve tried setting up the M2 in Emlid Flow on its own, without the Pixhawk? If it connects and receives NTRIP corrections there without issues, that would suggest the M2 itself is working fine, and the issue might be with the integration setup. Since this error appears comes from Mission Planner, their team might have more insight into what’s causing it. I suggest reaching out to their support.
If you’d like, we can still double-check that everything is working fine on the M2 side. Could you generate a full system report while the M2 is set up with the drone and send it to us at support@emlid.com? Since it contains sensitive info, email would be the best way to share it.
It could be a cable issue, but I’m not sure how to check whether or not the M2 is getting 5V thru the micro USB. Here is a link to the step down I use:
The step down gets it’s power from my PDB, which puts out 24V. I’m not sure if that amount decreases when I start flying.
I really would like to not have another battery on my drone, but I’m open to suggestions on how to power it. If you have any examples of the hardware you use, a link to the hardware would be nice to see.
Could you integrate Emlids power cable for M2 ? Or maybe or you’re using a USB cable for power ? I started building a drone kit about 2 years ago but gave up due to work and instead bought an Evo II and also a Matrice 350 with lidar.
This is what Emlid has but are for Pixehawks
Maybe one day if having enough time I’ll restart the project. The M2 is a really neat device and I use it occasionally in my survey work along with our Javad gear.
My pixhawk doesn’t supply voltage from the serial ports. So i am powering the emlid via micro USB setup as seen in the video previously mentioned. I wish there was some way to see error messages from the m2 itself to see what the issue is. It also doesn’t make sense to me as to why this would happen even in a simulation. Using the simulation tab on Mission Planner, you can view a simulation of what the drone is about to do. This same event where the orange light comes on when the drone is armed happens again even though the drone itself isn’t actually flying. That’s why it doesnt seem like a power issue to me.
If the issue doesn’t appear when the M2 is running solo on Emlid Flow, it further points to a possible integration issue with Mission Planner or the Pixhawk setup.
I still recommend checking the full system report from the M2 while it’s set up with the drone. It might reveal something useful, even though the issue might not seem power-related on the surface. Could you send that over to support@emlid.com?
I should’ve listen to you guys earlier, but I’m pretty sure it’s a power problem now. Today, I used 3 different power sources. 1 was from the pixhawk servo rail, 1 was from the PDB with a step down, and the other was from a power bank I use to charge my phone. Each test except using the power bank resulted in that orange light coming on. So Im guessing its a power issue now.
What are some ways to power the emlid without bringing on a whole new power bank? I’m assuming I can use the PDB somehow, but I think either the cable or the step down is causing it to not give it enough power. Any ideas?
Thanks for the update! I agree that since the M2 works fine with a power bank, the issue lies in the other power sources or cables. The main requirement is a stable 5V, so it might help to check if the step-down module is actually providing that.
Beyond that, we don’t have a specific setup recommendation, but others here might have more experience with similar integrations. Hopefully, someone can share what’s worked well for them.
I’m back with some new questions. I noticed on my NTRIP provider that it was only sending corrections every 30 seconds and I think this is what is causing the GPS2 not found error I am now receiving. One of the support teams for my NTRIP provider looked into the logs and said
“I took a look at the log files for your sessions and something I am noting that seems out of the ordinary is that your device is sending us an NMEA/GGA position message every 30 seconds. Different RTK receivers send a message in different frequency and I believe some can be adjusted but I typically see one every 3-5 seconds from most systems. So the fact that you are stating you are only receiving corrections every 30 seconds and that is lining up with our system receiving a position message every 30 seconds seems like a pattern. Is there possibly a setting in your system that controls how often your device is receiving and/or sending?”
Is there a way to change the frequency of the M2 of how often it receives/sends corrections? I think it isn’t sending fast enough, which is causing the flight controller to get confused and think that there isn’t an actual RTK module on it. Does this sound correct?