



Millimeter-precision, tsk, that’s not possible with GNSS! Well, it is actually!
The key is either multi-base and/or multi-observation and then combine these using a Least Squares Adjustment capable GNSS processor such as Effigis OnPoz EzSurv.
In this example I am using the clubhouse of a local modelflying-club, 6 GCP’s and 4 CP’s, spaced roughly 5-6 meters apart.
I am using 4 RS2’s in total, 3 as bases, 1 as Rover + an NTRIP connect to a national supplier using RS2’s (RTKconnect.dk). The NTRIP-service is used to determine the absolute location.
Resolution of material is around 0.003 m/px (24 mp shots, from DJI Phantom 4 Pro and APS-C sized sensor in a compact-camera, both pre-calibrated). Using around 500 images.



I will do 3 different combinations:
- NTRIP + Rover, baseline 21 km, single observation per marker.
- Single base + Rover, baseline <100 meter, 3 observations of 30 sec to 1 min observation-time per marker. Network-adjusted.
- 3 Bases + 1 rover, baseline <100 meter, 3 observations of 30 sec to 1 min observation-time per marker, totaling 9 different solutions pr marker (3 bases*3observations). Network adjusted.
So let’s jump right into the results:
NTRIP + Rover:

Checkpoint total error: 0.047 m
Single base + Rover, 3 * obs pr marker:
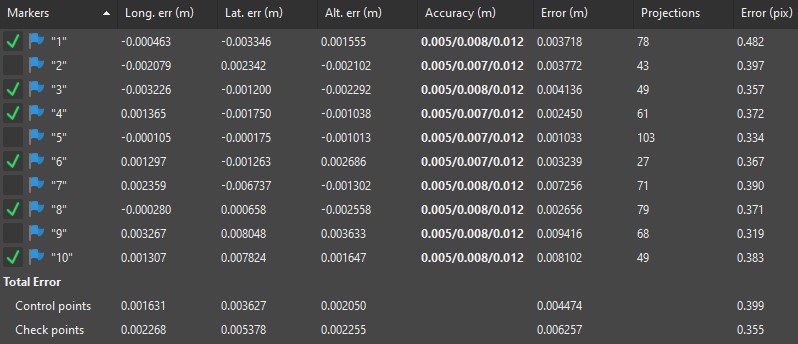
Checkpoint total error: 0.0063 m
3 Bases + 3 observation pr point:
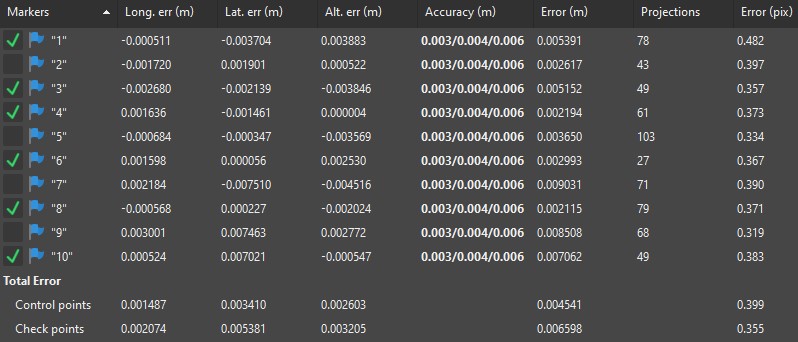

Checkpoint total error: 0.0067 m
So, the multi-obs per point seems to be where the magic really starts. However, if you also need accuracy, the 3 bases will help in solidifying the absolute accuracy.
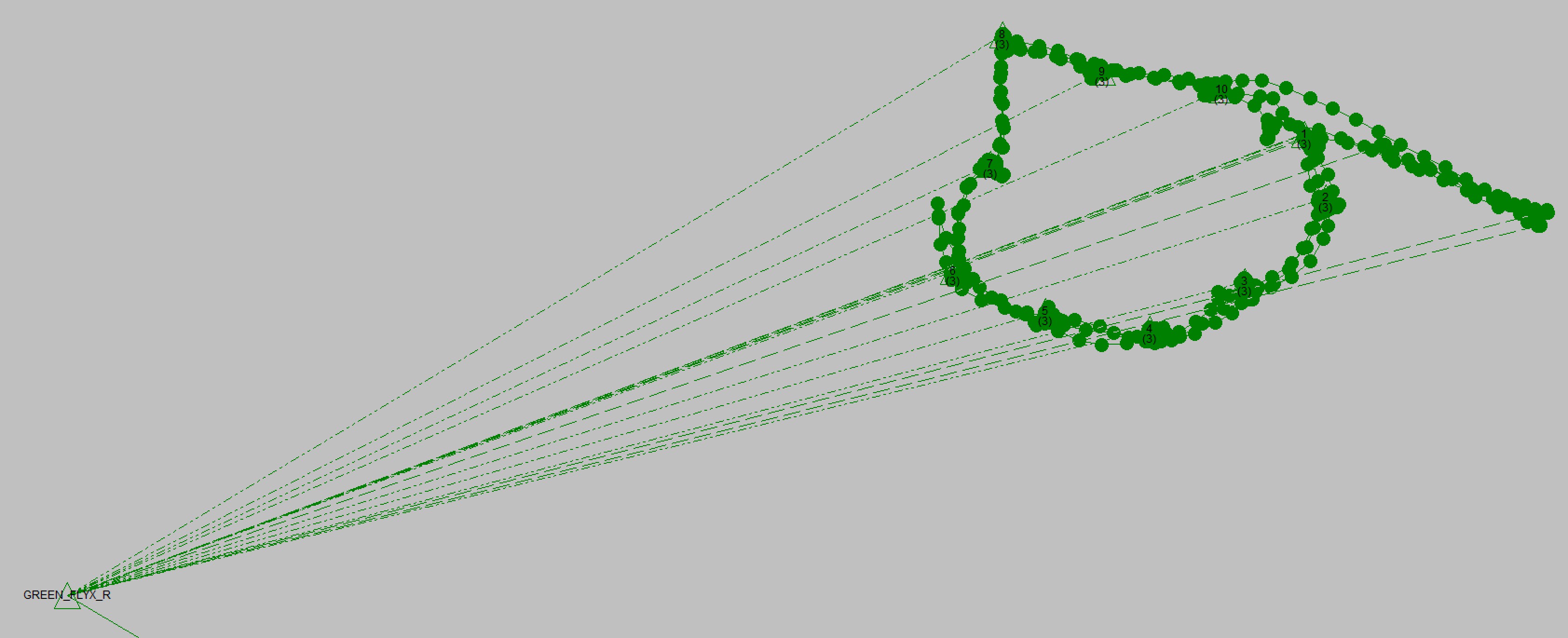
And then, finally, a small 3D model of the aforementioned clubhouse. Not perfect, but still pretty happy with the reconstruction of the smaller details:
