



Hey guys so I’m trying to use my base station and rover together and for whatever reason it’s not allowing me to communicate between the both. I’m trying to use microsurvey feel genius for android and I cannot get this to work for the life of me. Please help
What models are you using? How are you trying to get them to communicate? Help us out a little. This may be a good place to start.
1 Like
Hi Joseph,
Please, share the following screenshots:
- Correction Input tab on the rover
- Correction Output section on Base mode tab on the base
These screenshots will help me to see what may be the issue.
1 Like
The first set of photos is the base mode. The 2he set are the rover
Neither one of those are the correct screens. On the rover go to the 3-bar menu and select Correction Input. On the base go to the 3-bar menu and select Base Mode. Make sure to screenshot the top section.
(post withdrawn by author, will be automatically deleted in 24 hours unless flagged)
I’m trying to upload sorry I have bad cell service I’m on a job site trying to up load for you.
1 Like
Hi Michael,
Thanks.
I have already gone through this documentation and set up as best described. Although this appears to be the document for the older Reach View APP. I kind of stumbled through with no success. Is there any live support for this product?
Also can the RS2 just be used as a basic GNSS Rover without a Base.?
I’ll have to check, but we have continued to configure via Reachview 2 until they release all this functionality for Reachview 3. There’s allot of notes to keep up with. I’ll set mine up in a minute and see what’s available.
I am sure someone from Emlid will be here before you know it and can provide the support options.
Yes, but only with post-processing or an NTRIP service.
1 Like
Just checked and both the Android and iOS versions of RV3 have had settings added, one of them being NTRIP and I verified that a change in RV3 is reflected in RV2. The only difference I noted between the two version on the different OS’s was that iOS RV3 does not prompt you immediately for a mount point profile when you select NTRIP as the corrections input.
Hi Michael,
thanks for this info.
I am struggling with some fundermentals.
If my RS2 is the to be my BASE, I would setup my Emlid caster setting in Base mode tab.?
If my D- RTK2 is my rover I would setup my Emlid caster setting in the Phantom remote and oderate in mode 3 handheld.
What do I put into Correction Input and Position Output?
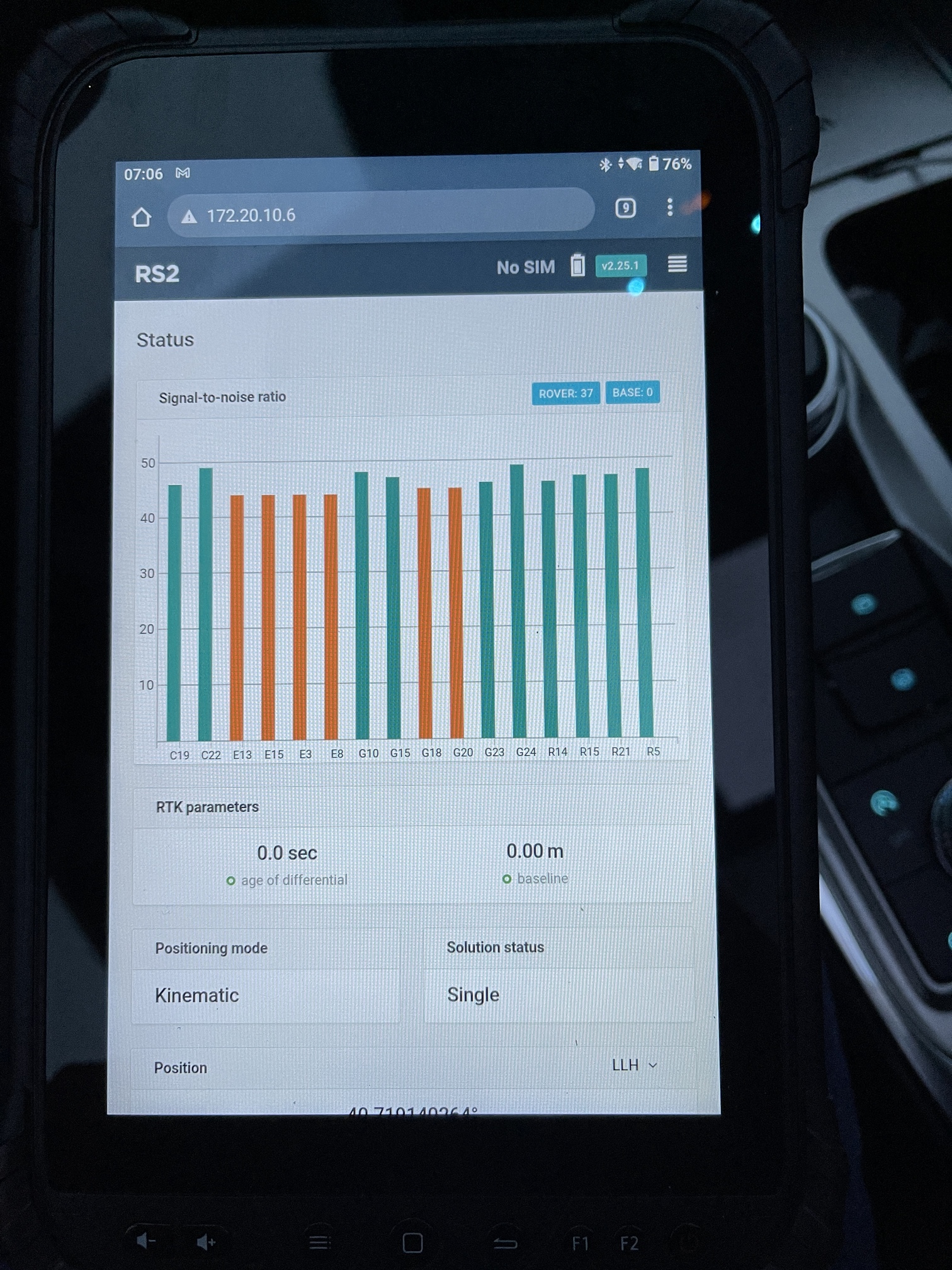
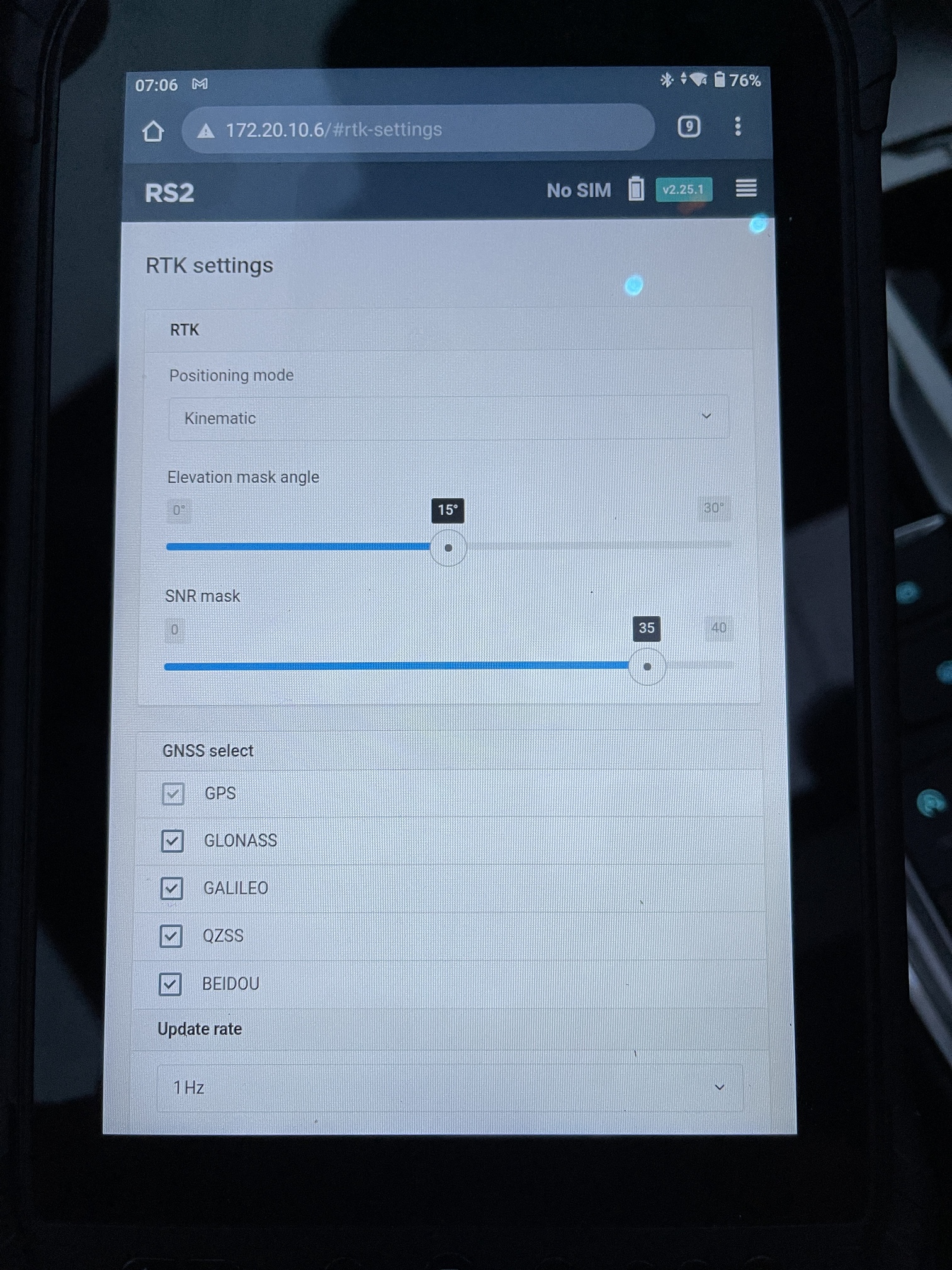
Hey, I see from your photos that your base and rover are using development firmware v2.25.1, which from previous posts from others who have tested it say there are some bugs that greatly seem to impact communication and getting fix between the units. Can you downgrade to the last stable firmware v2.24.X and see if that solves your communication problem?
Hi Joseph,
Please, reflash the unit back to the latest stable, 2.24.2, as @Africawaterdoc suggested. A step-by-step guide, the flashing tool, and the firmware are available in this docs entry.
Your units are indeed running our latest dev release, where we encountered the bug with the LoRa communication. I’ll post an update here once the fix will be released.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.