



First, I would like to give thanks to the Emlid Studio team for a fine, easy-to-use product. Also, thanks to the developers of RTKLIB and Tim Everett’s extension’s to RTKLIB.
I am trying to get the same results in RTKLIB as I do in Emlid Studio. I am using Emlid Studio (ES) Version 1.7 and RTKLIB v Demo5 b34i. I am assuming that this is version of RTKLIB that has the most similar engine to ES.
The reason I want to do this is to see what additional gain in accuracy I can achieve in RTKLIB by providing precise ephemeris and clock data, which is something that I am unable to do in ES. But before I add that data I want to make sure that my results without precise Eph/clock data agree between ES and RTKLIB. My problem is that I am getting quite different answers between ES and RTKLIB, with a discrepancy of 1-3 m depending on the RTKPOST settings.
This is part of a trial in which I am trying to assess performance of different GNSS receivers under forest canopy and I have used a total station to get the coordinates of my peg (uncertainty ~20 cm).
For a static survey of 60 minutes the solution that ES gives (using differential corrections from a CORS station 83 km away plus the navigation file) has an accuracy of 42 cm and a precision (2DRMS) of 4cm.
For exactly the same data inputs, the solution that RTKLIB gives has an accuracy of 151 cm and a precision of 58cm.
These statistics are worked out on just the float solutions only - I am seeking decimeter rather than cm accuracy - and the fixed solutions seem to be unreliable due to the multipathing under forest canopy. However, if I choose all solutions (fixed and float) or just fixed, I get the same sort of descrepencies between ES and RTKLIB.
So, it seems that some of the settings in RTKLIB which are not accessible to the ES user are different. I have tried to work out what they are but have not succeeded.
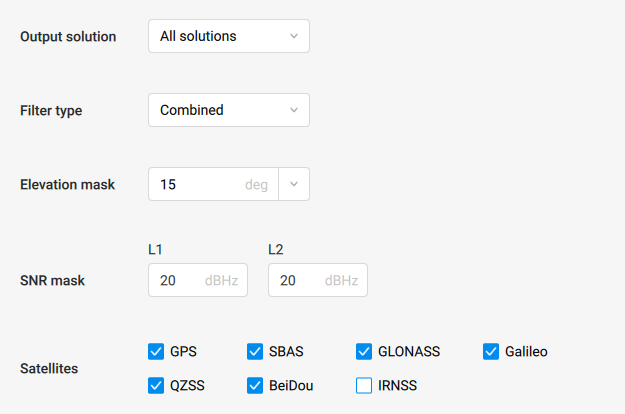
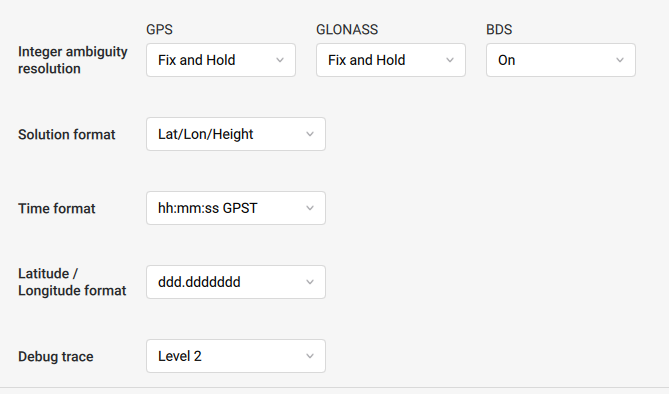
My Emlid Studio Settings are:
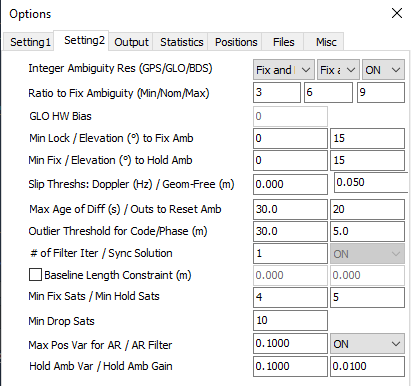
My RTKPOST settings are
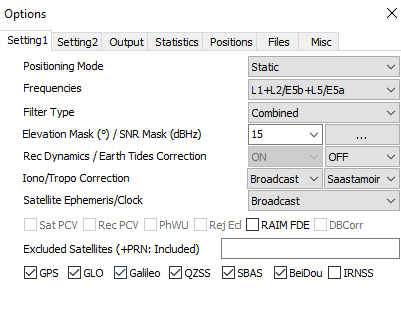
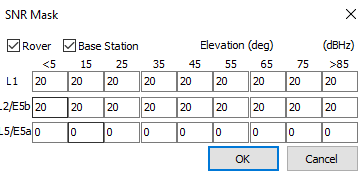
Are there any settings in RTKPOST shown here that would cause it to give a significantly different result than ES?
It would be great to know what the ES ‘hard-wired’ settings are for those parameters available in RTKPOST that are not accessible to the ES user.
For instance,
- does ES use the “Broadcast” setting for the Ionosphere Correction?
- What values does ES use for the ratio to fix ambiguity? (Min/Nom/Max)
I’d be very grateful for anyone’s help with this.