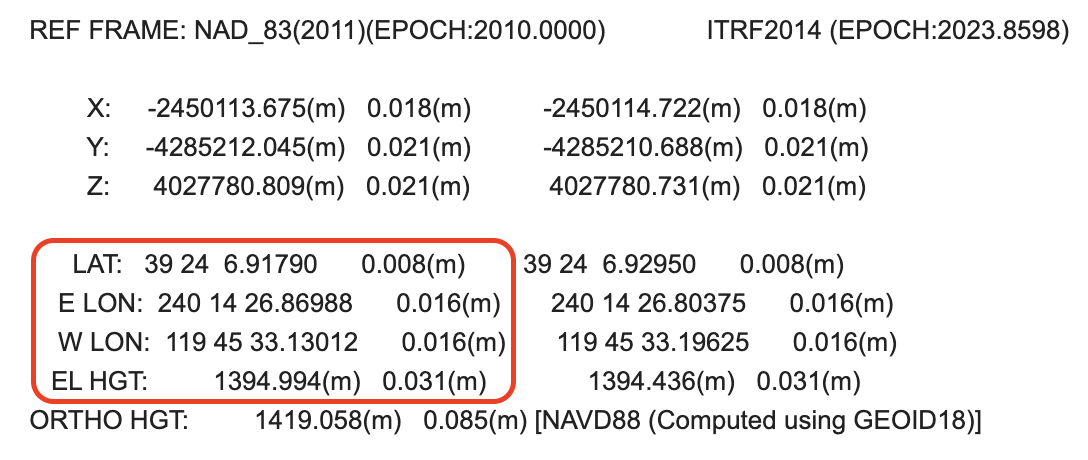
If you need your GCPs to be coherent with the base coordinates, you need to process them using the OPUS coordinates. You can input them in the Base tab of Emlid Studio.
They can be in FIX in RTK, while some of them may get a FLOAT in Stop & Go. These are two different algorithms, and Stop & Go solutions can be improved by tweaking settings in Emlid Studio. Meanwhile, the RTK solution is calculated in a real-time.
You just need to import them back to the project with the required coordinate system. Emlid Flow will convert geographical coordinates to projected ones, you don’t have to use the NCAT tool for this.
You can send me all of your files to support@emlid.com, so I can try to reproduce the issue myself. Most likely, it should be possible to correct the last point by tweaking settings in Emlid Studio.
I will do all of the things you prescribed above, but first I have some follow up questions.
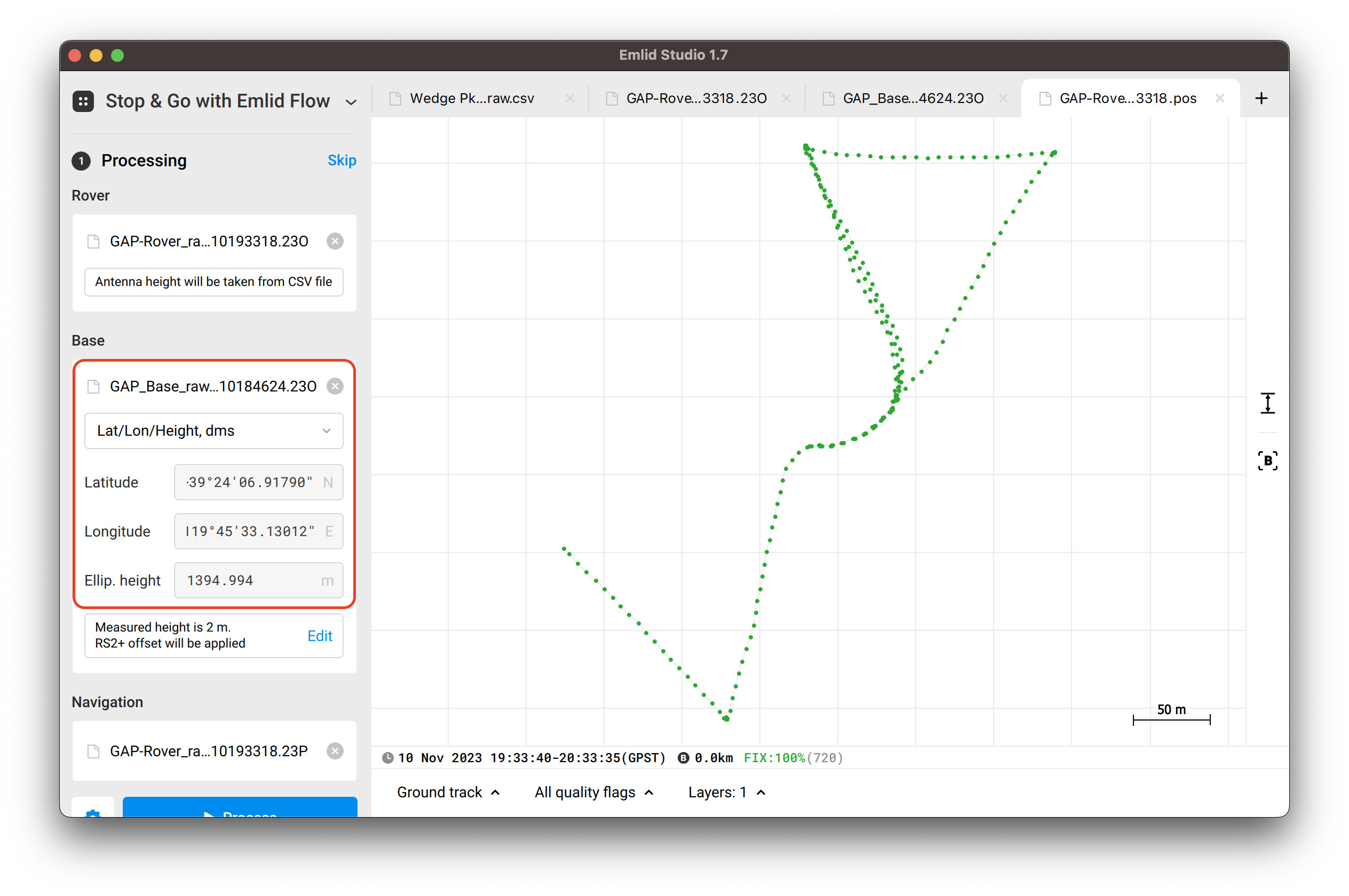
In regards to the first item, yes, I do need my GCPs to be coherent with the base coordinates so what I need to learn is how to process or convert the .csv survey project file I exported from Emlid Flow into OPUS level coordinates. How do I input multiple GCPs into the base tab of Emlid Studio? Do you mean drag the .23O file from my rover into the base field? And I need to do this using Stop & Go? Or Kinematic? I’m not sure which function in Emlid Studio to use for this?
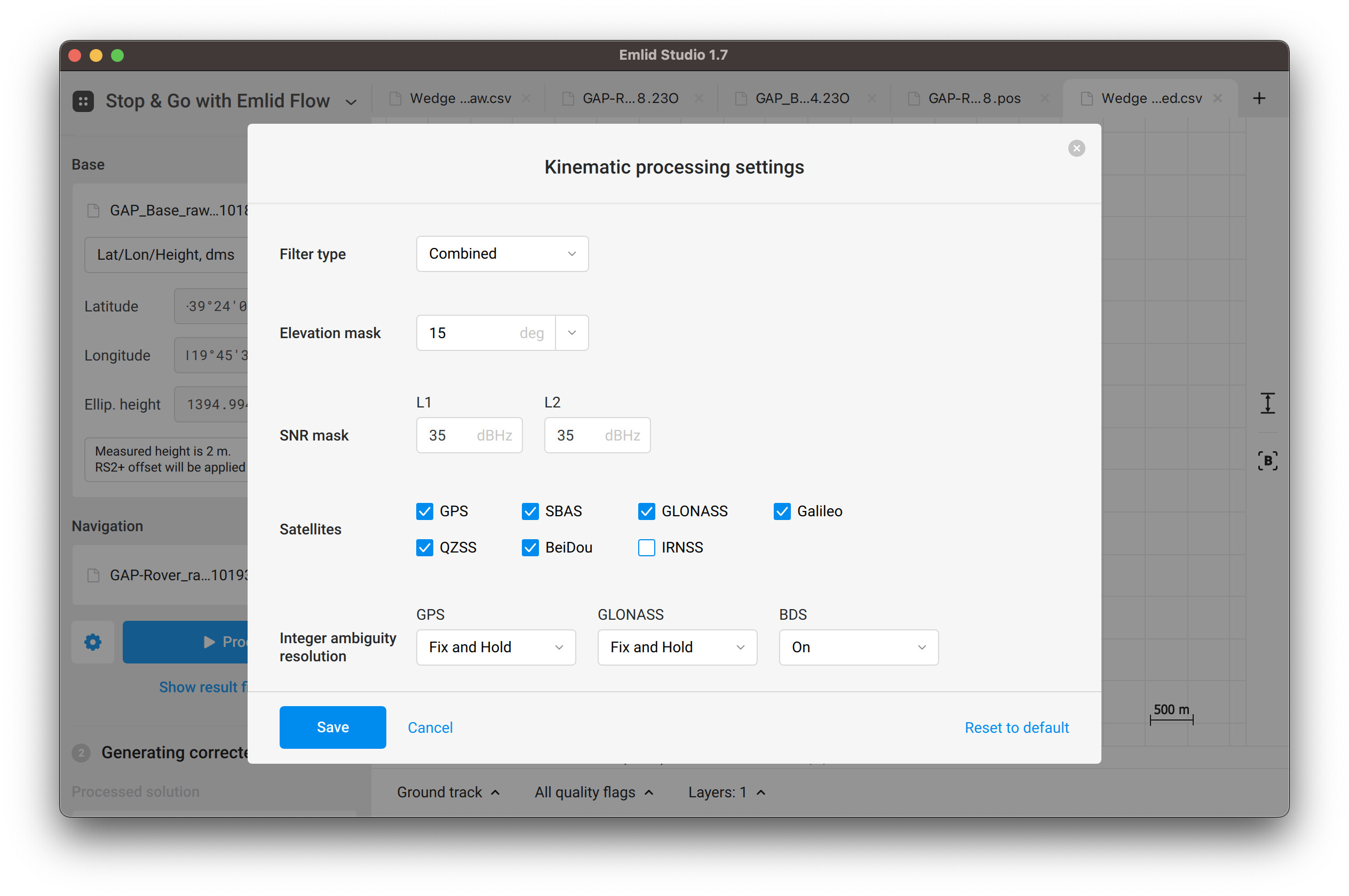
Next, how do I “tweak” the settings in Emlid Studio so all of my GCPs get averaged in FIX?
Lastly, I think you are saying I can import the .csv file with the “corrected” Lat, Long, Ellipsoidal Heights back into Emlid Flow and the Easting, Northing, and Elevation values would automatically populate? If this is true, I assume I could also import the “corrected” .csv file into Emlid Flow 360 and accomplish the same thing?
Also, is it possible to recover the GCP that is missing due to being averaged in Float or Single in Emlid Studio? I can see the global and local coordinates in the survey project in Emlid Flow, but even if I manually enter them into my .csv file, I don’t think they will be “corrected” while the other GCPs will be? Maybe the “tweaking” step in Emlid Studio will allow me to recover this “lost” GCP?
Many Thanks for all your help! We’re slowly but surely working through all of these problems!
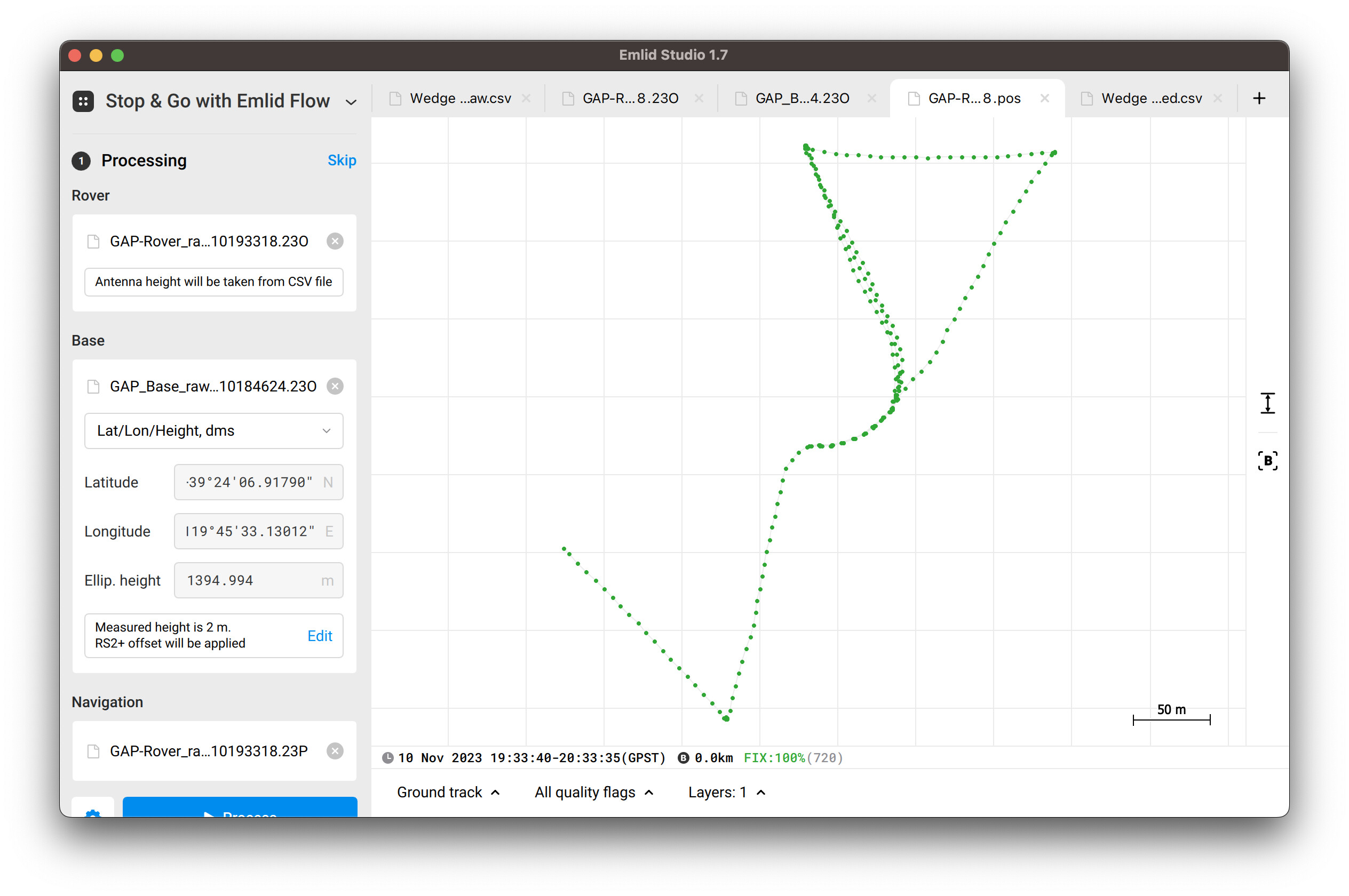
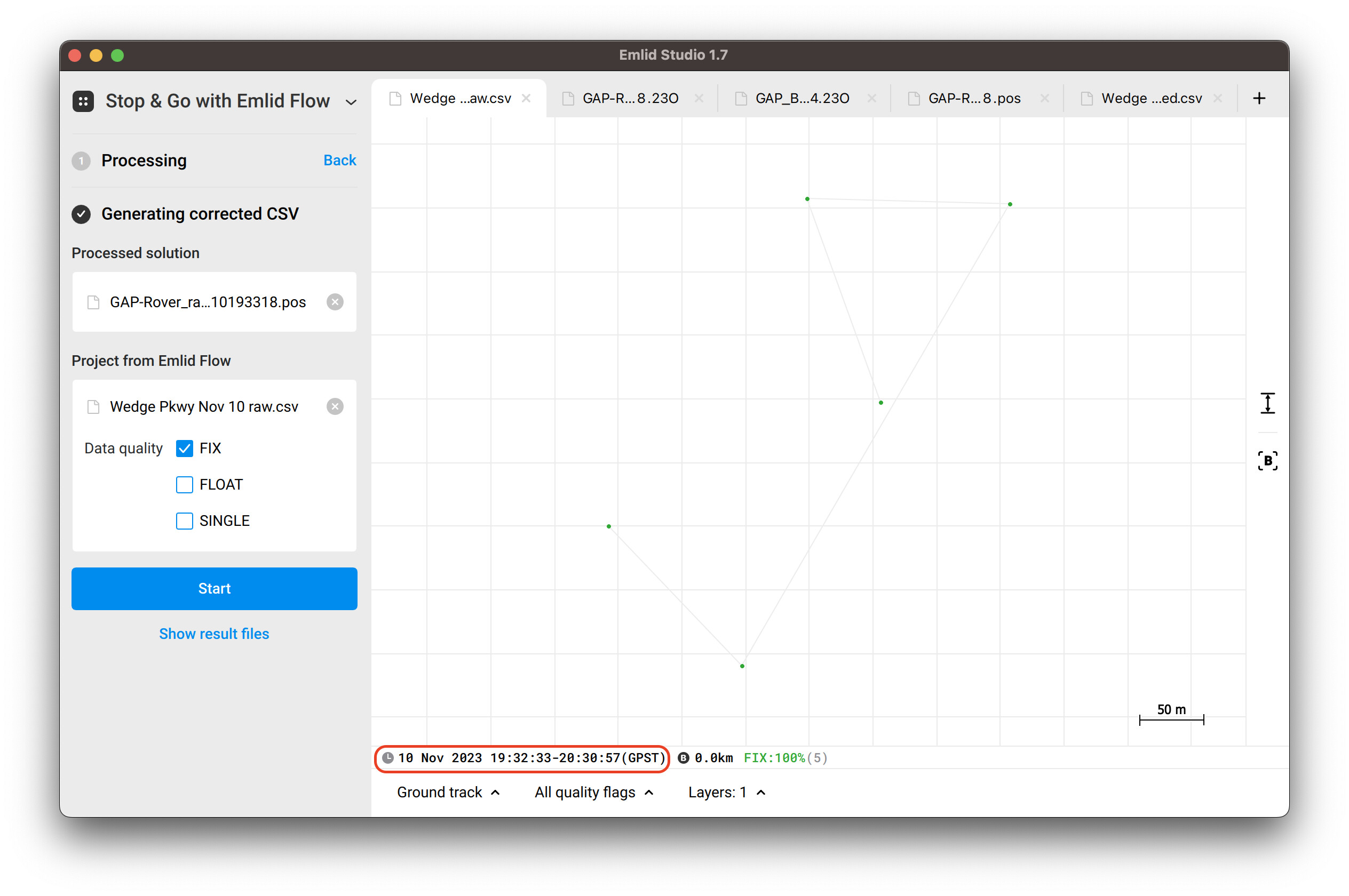
So I just used Kinematic Processing in Emlid Studio. I imported the .23O and the .23P files from my rover, and the .23O file from my base and got back a .pos file. Can I find / get all five of my GCPs averaged in Fix in the .pos file? How do I do this?
Or do I need to use Stop & Go? There are two .pos files, the second one has “_events” at the end of the name. I assume each one of the GCPs is an event? My question is I don’t know how to use .pos files? Do they contain OPUS level coordinates?
You need to use Stop & Go, not Kinematic. Kinematic is a part of Stop & Go because it creates the pos file. The pos file is used to improve the points collected in Emlid Flow to FIX solution.
Awesome! Thanks! I will follow what you did and hopefully get a “corrected” .csv file that Applanix PosPac & YellowScan CloudStation can use and not get a No Overlap error.
I have some exciting news to report! I followed the steps you gave me and was finally able to successfully run Strip Adjustment in YellowScan CloudStation without getting the No Overlap error!
I am extremely relieved! It was a tough and frustrating learning experience and I made just about every mistake I could have, but now I know what to do and what not to do.
Thanks for all your patience and help! I really appreciate it!