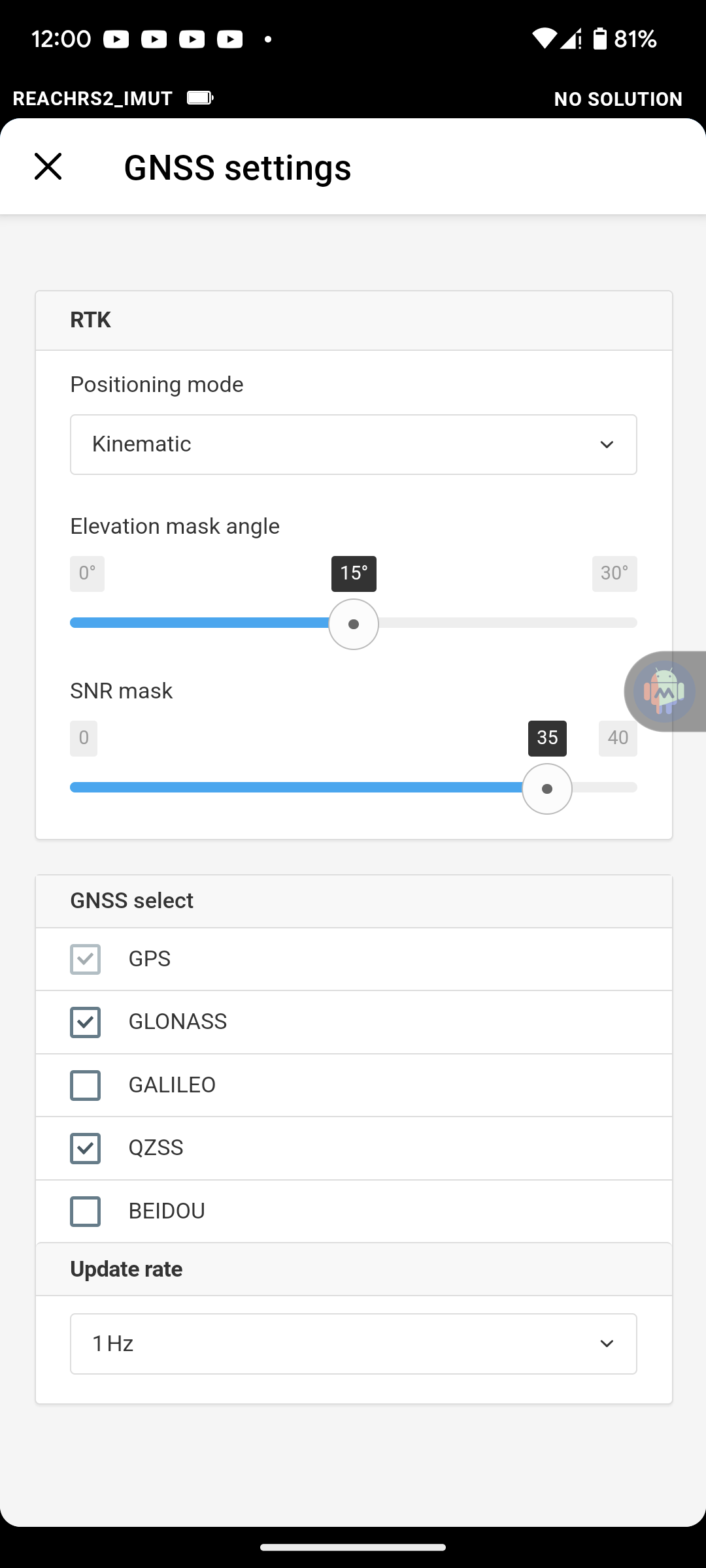
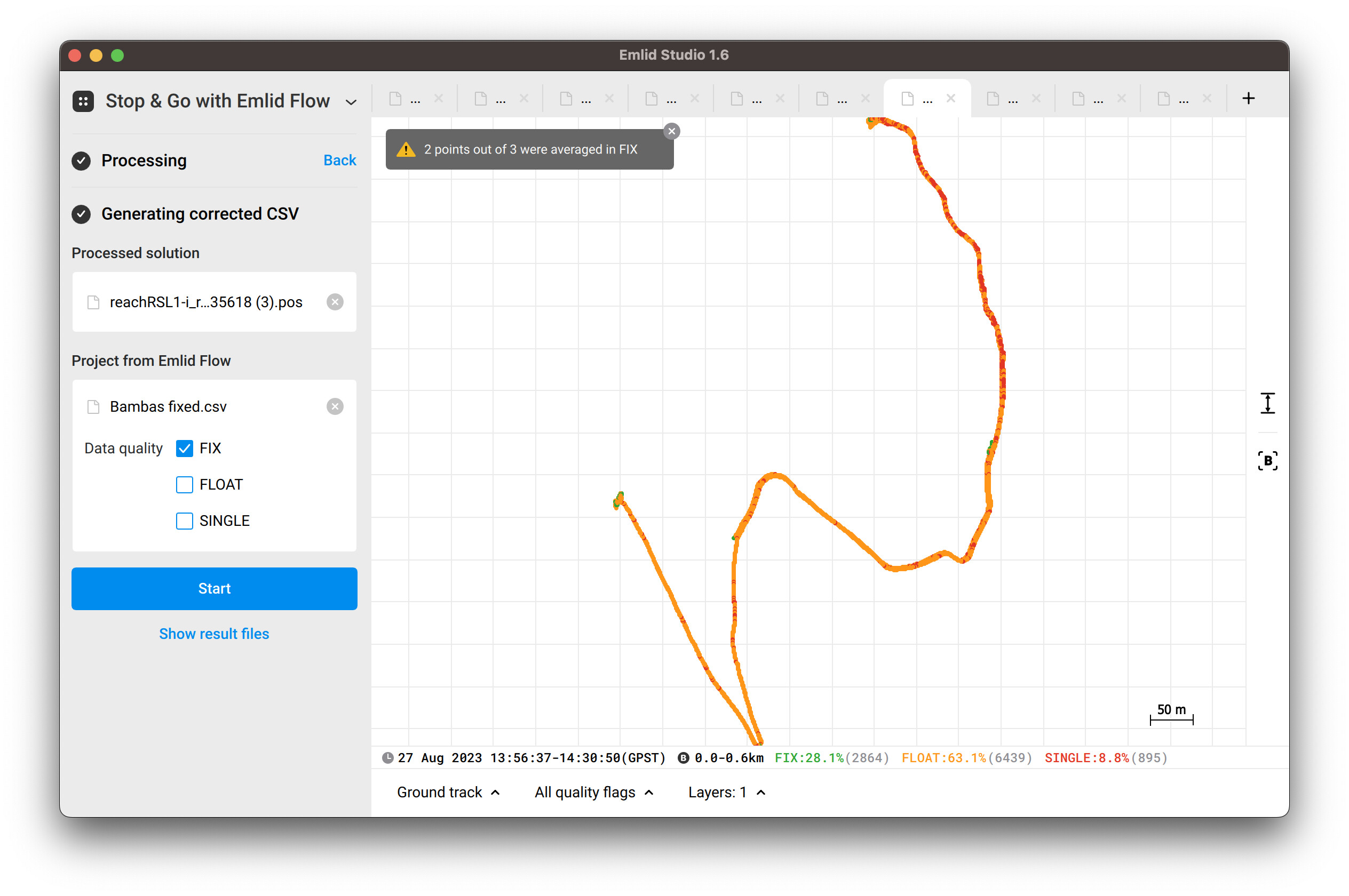
I tested my RS2 as base and RS+ as Rover. My plan was to create GCPs with PPK postprocessing. Using “Stop to Go " processing with Emlid Studio, the PPK process seems to result in good shape, showing the path with the fix%,Float% and Single%; but when tried to correct the “points” from the CSV file, appear the message: " 0 points out of 3 were averaged in SINGLE, FLOAT , FIX”. If a review the CSV the 3 points are there, but for some reason They are not corrected. It is the setup of my base and Rover:
I tested my RS2 as base and RS+ as Rover. My plan was to create GCPs with PPK postprocessing. Using “Stop to Go " processing with Emlid Studio, the PPK process seems to result in good shape, showing the path with the fix%,Float% and Single%; but when tried to correct the “points” from the CSV file, appear the message: " 0 points out of 3 were averaged in SINGLE, FLOAT , FIX”. If a review the CSV the 3 points are there, but for some reason They are not corrected. It is the setup of my base and Rover:
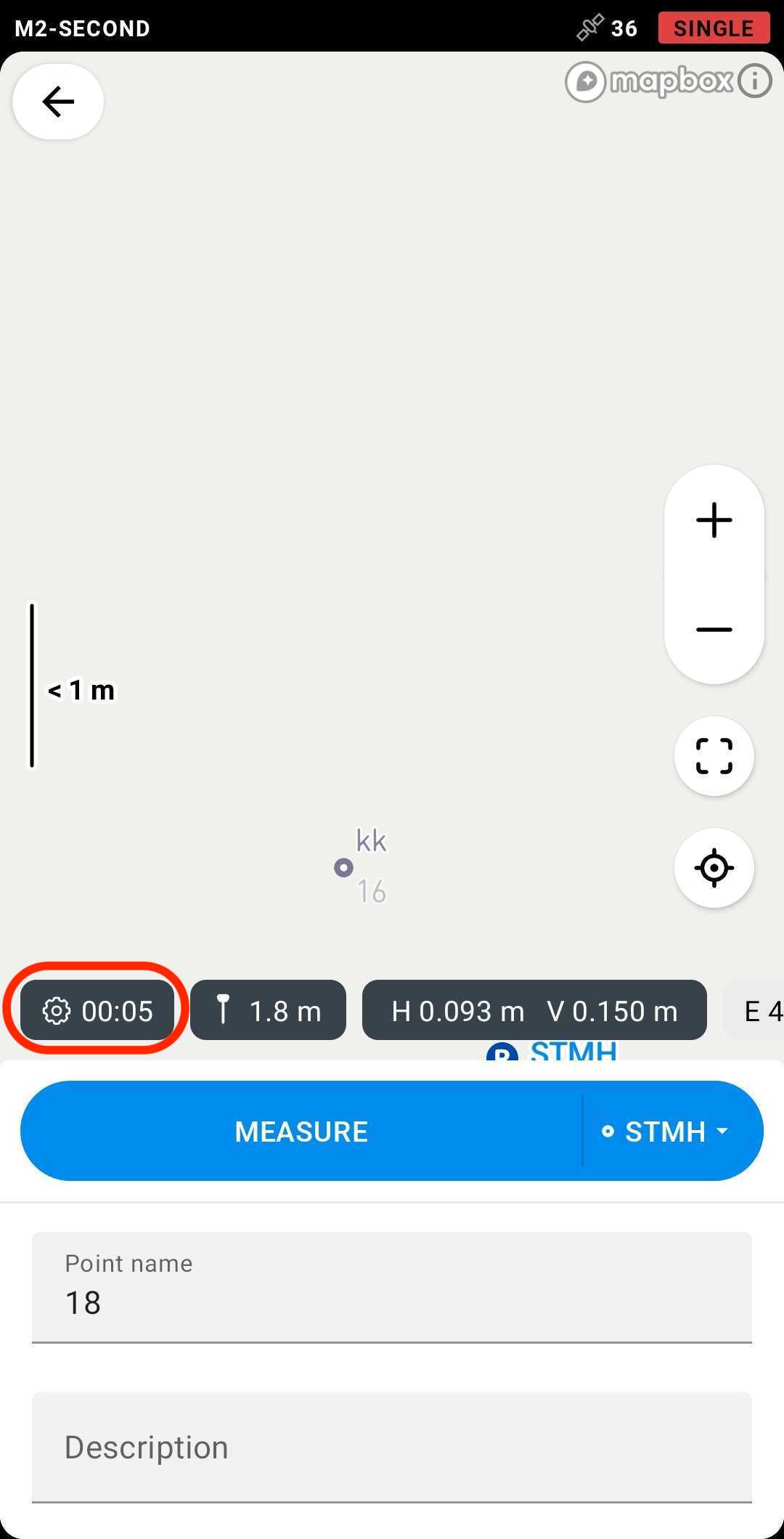
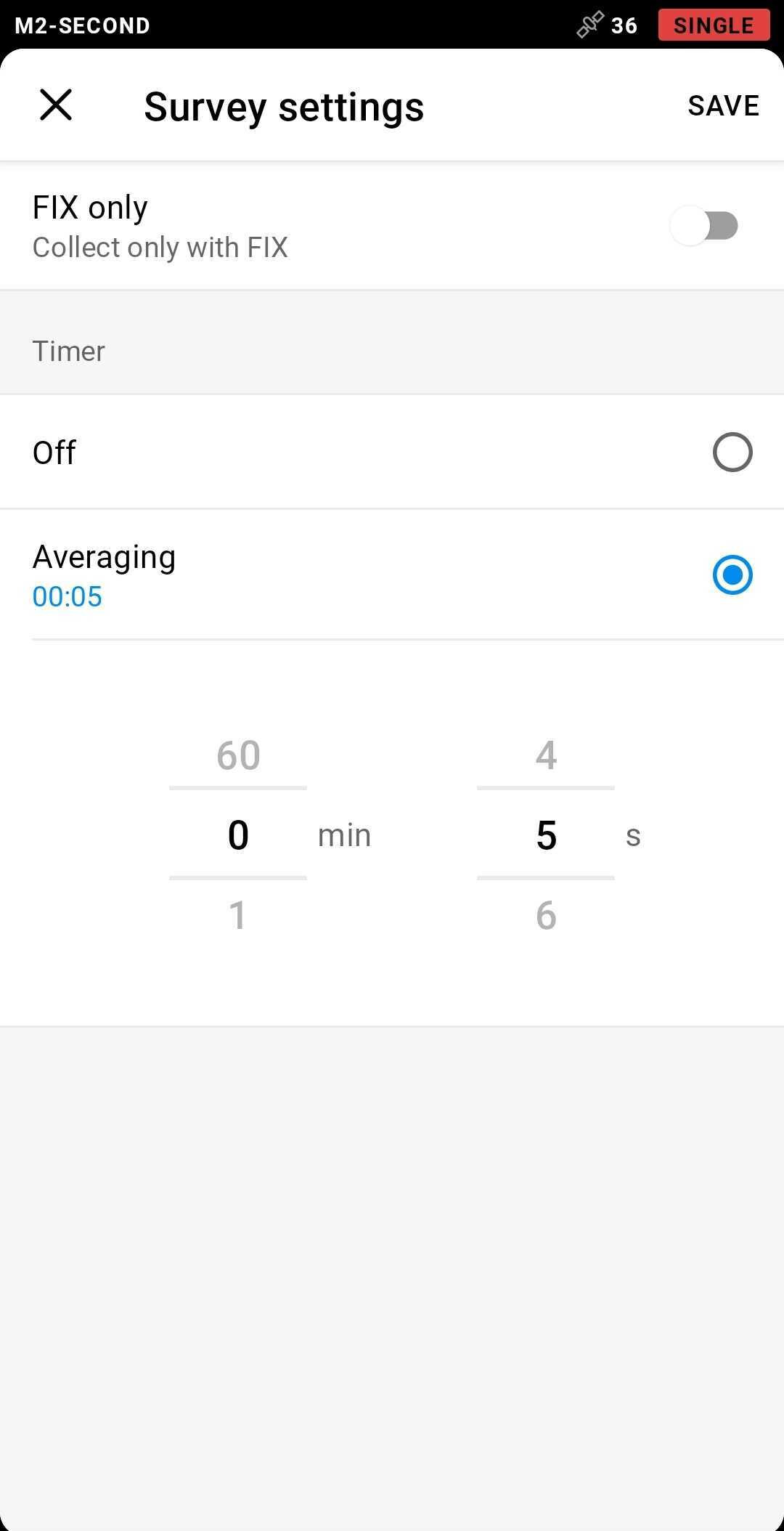
Your points weren’t processed because they were collected instantly without averaging in Emlid Flow. For Stop & Go workflow, it’s essential to average points. Otherwise, you’ll get zero points processed.
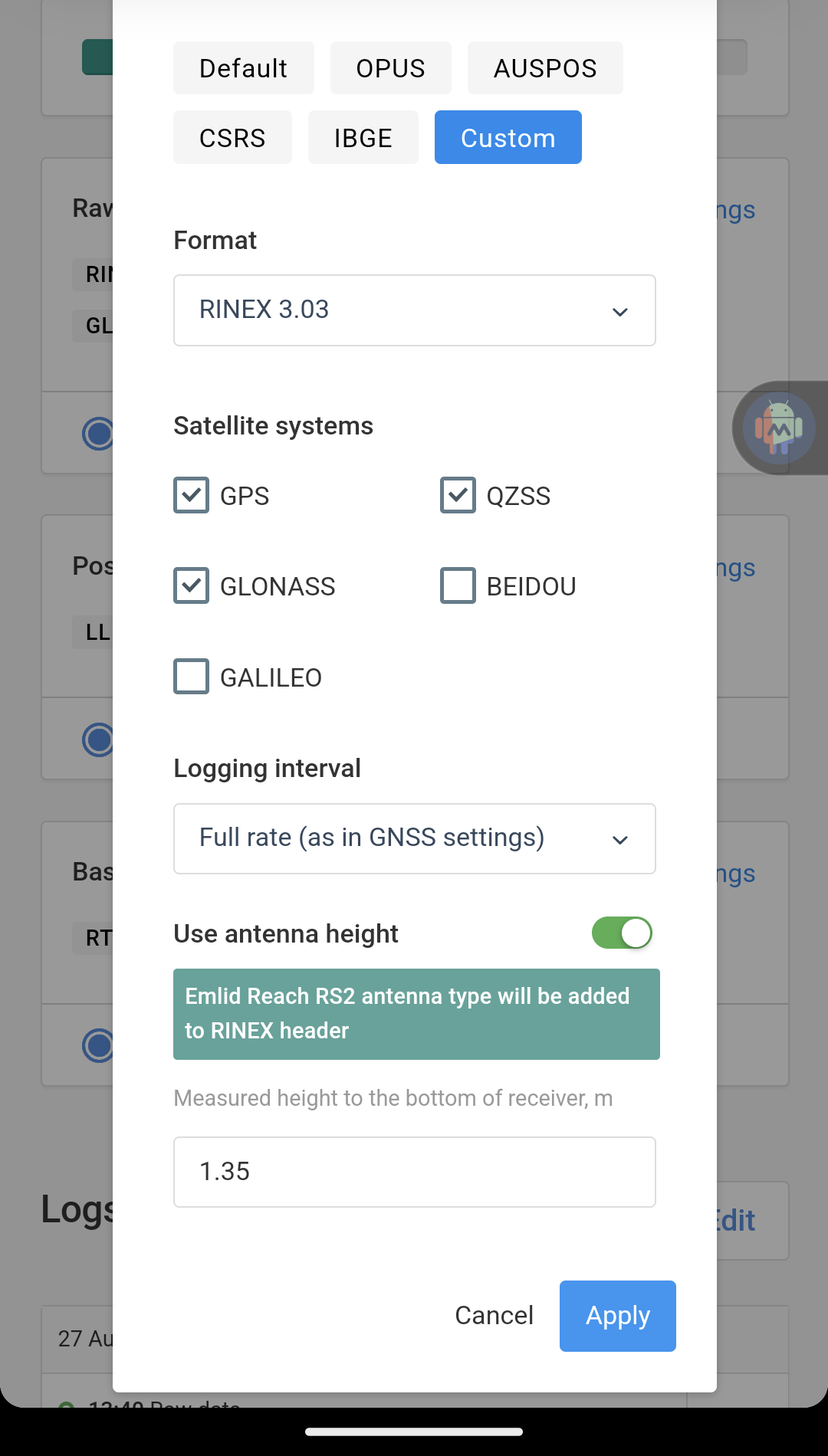
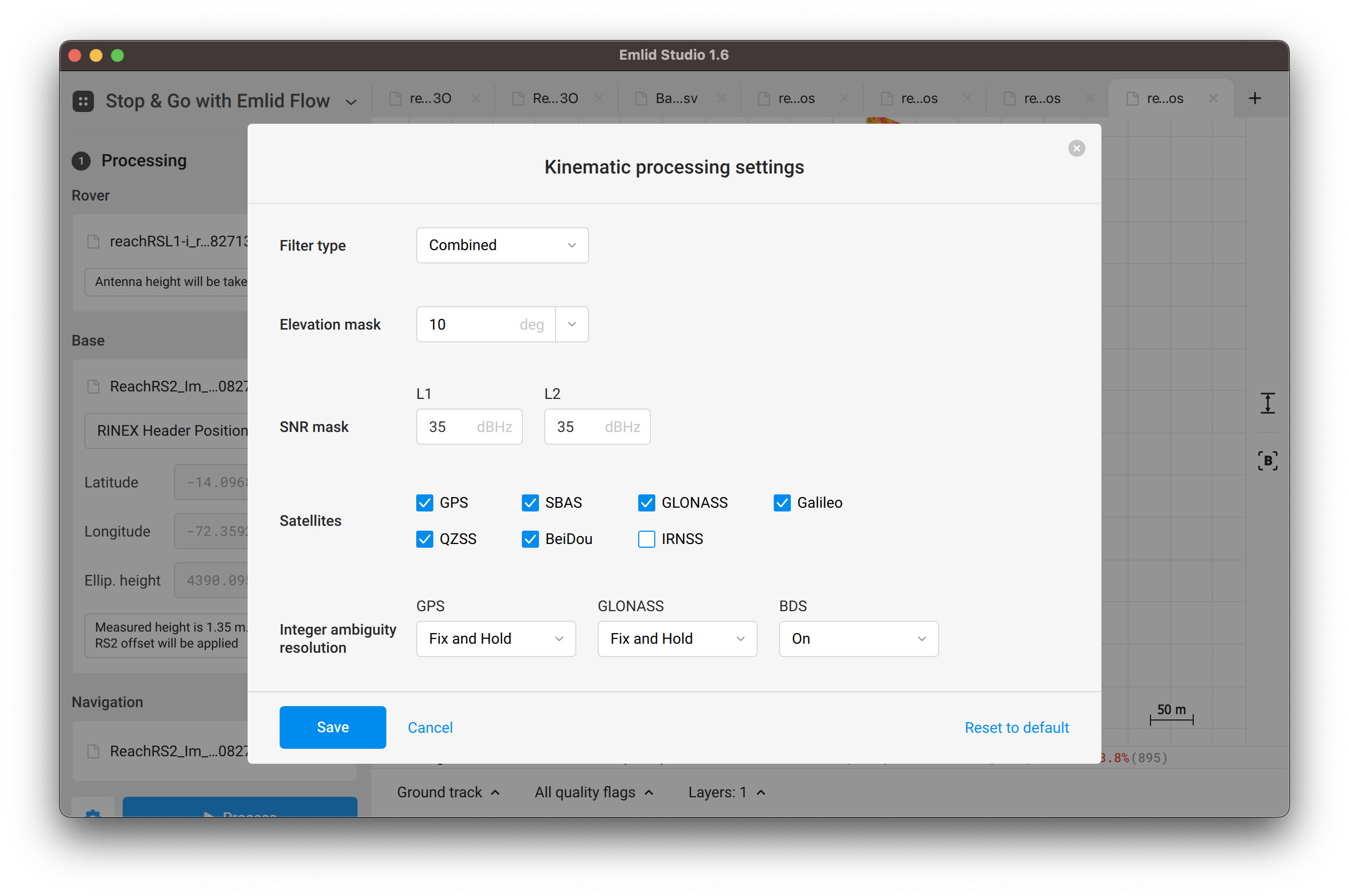
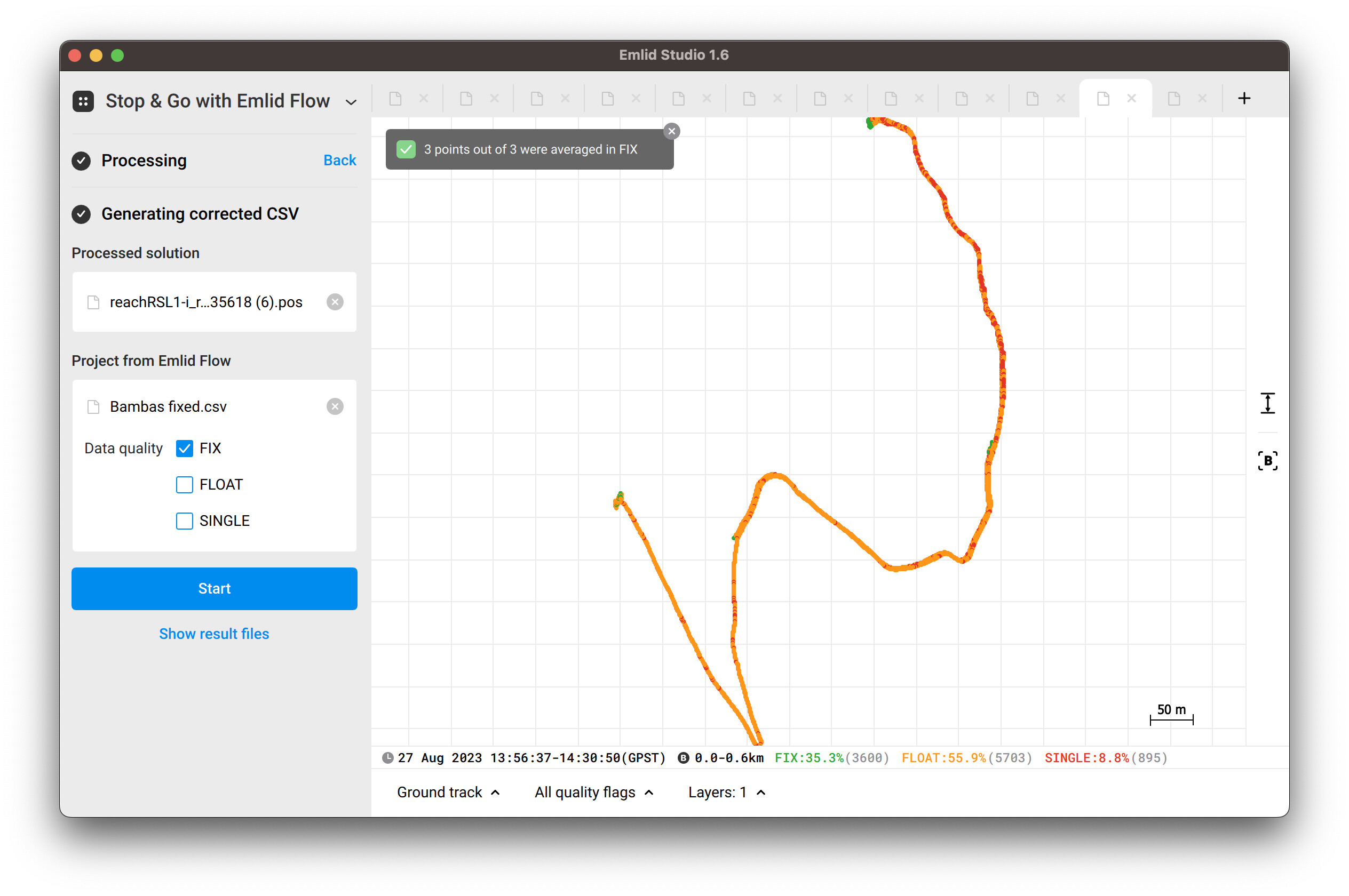
I’ve fixed your CSV file by adding one second to the time stamps of the averaging end. Then I used the following settings in Emlid Studio
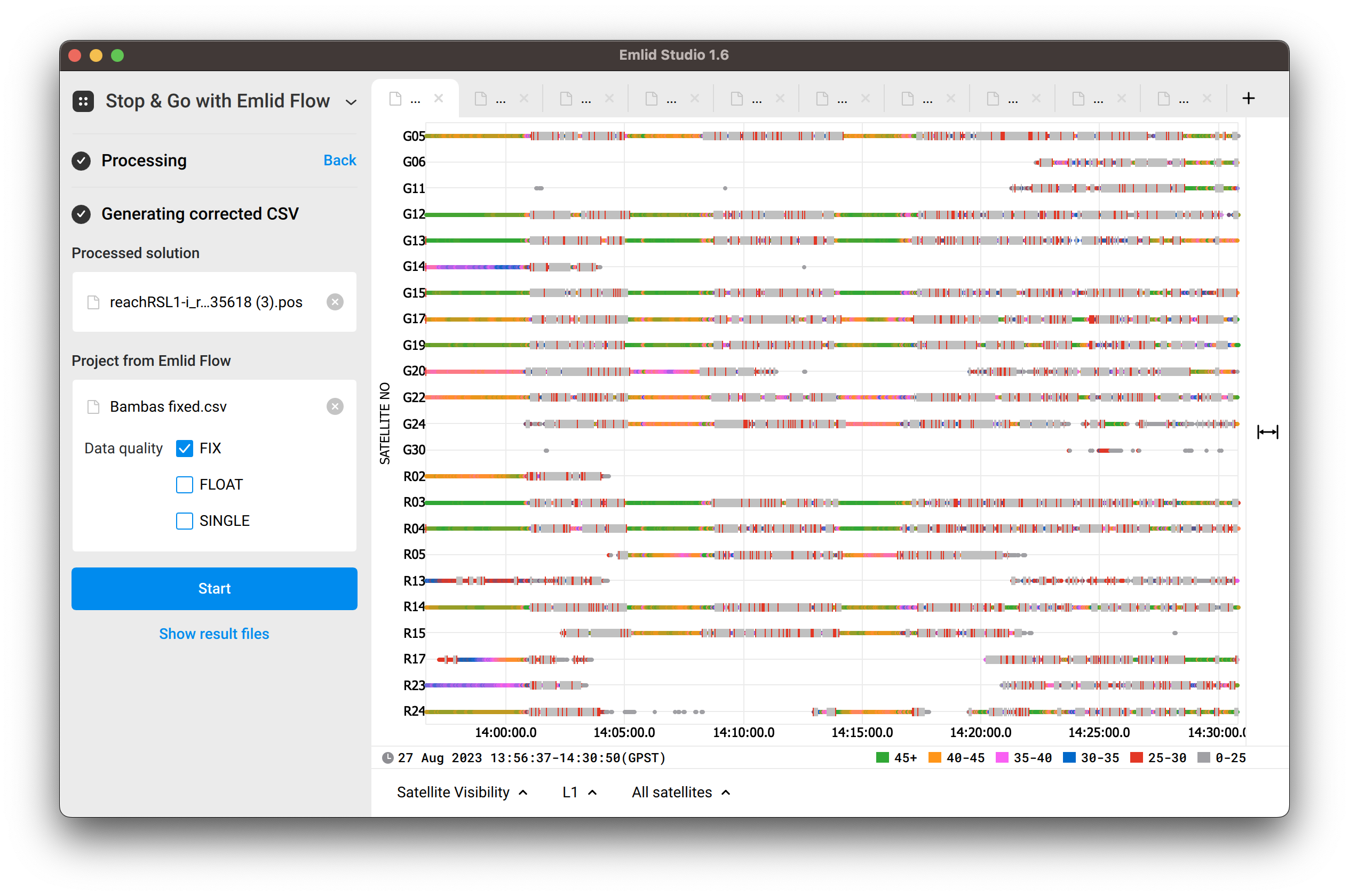
These alternating grey and red bars show parity unknown flags and cycle clips, respectively. They appear when the signal is interrupted and the half-cycle ambiguities in carrier-phase aren’t resolved. When they’re not resolved, you get the FLOAT solutions presented during most of your log.
I’ve attached the resulting pos and CSV files to the zip archive below. Juan Pablo.zip (265.9 KB)
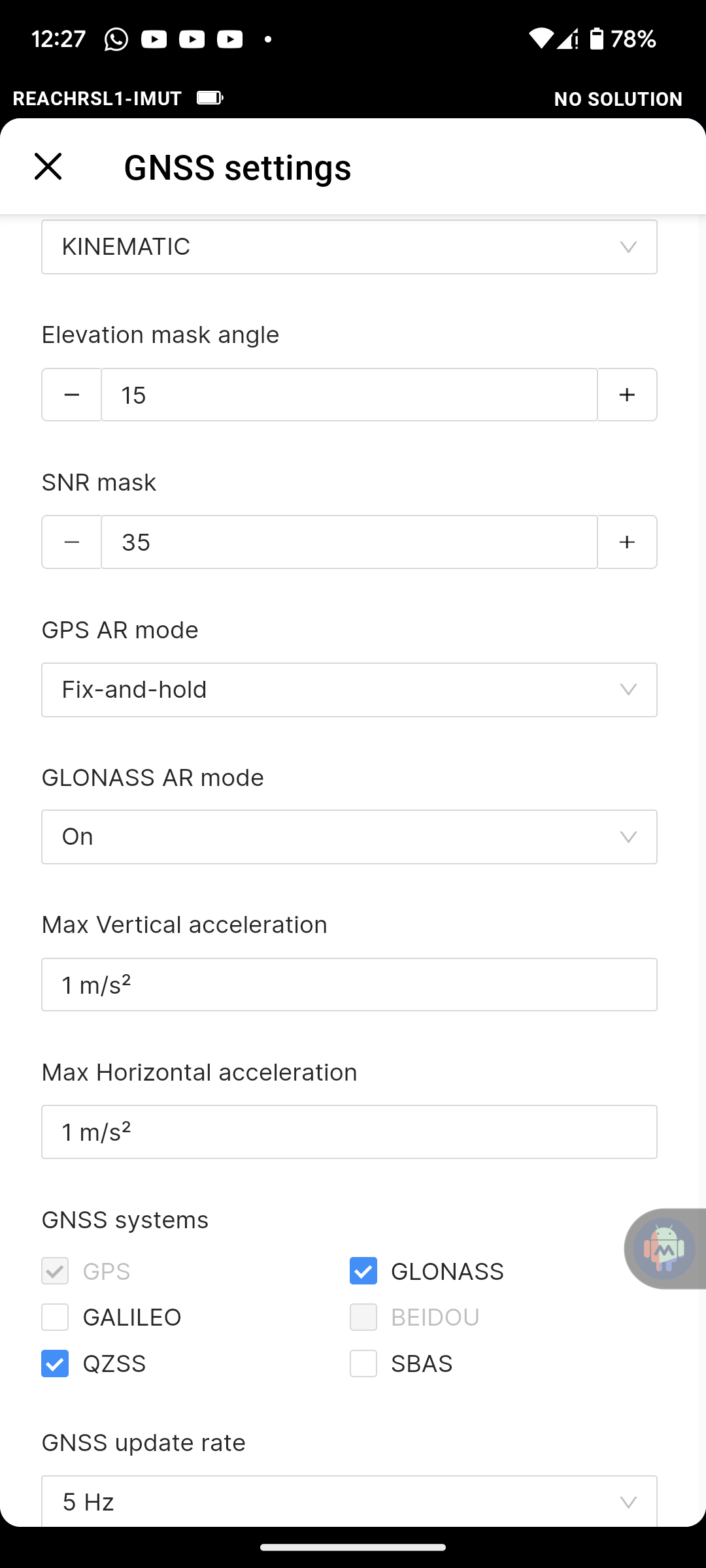
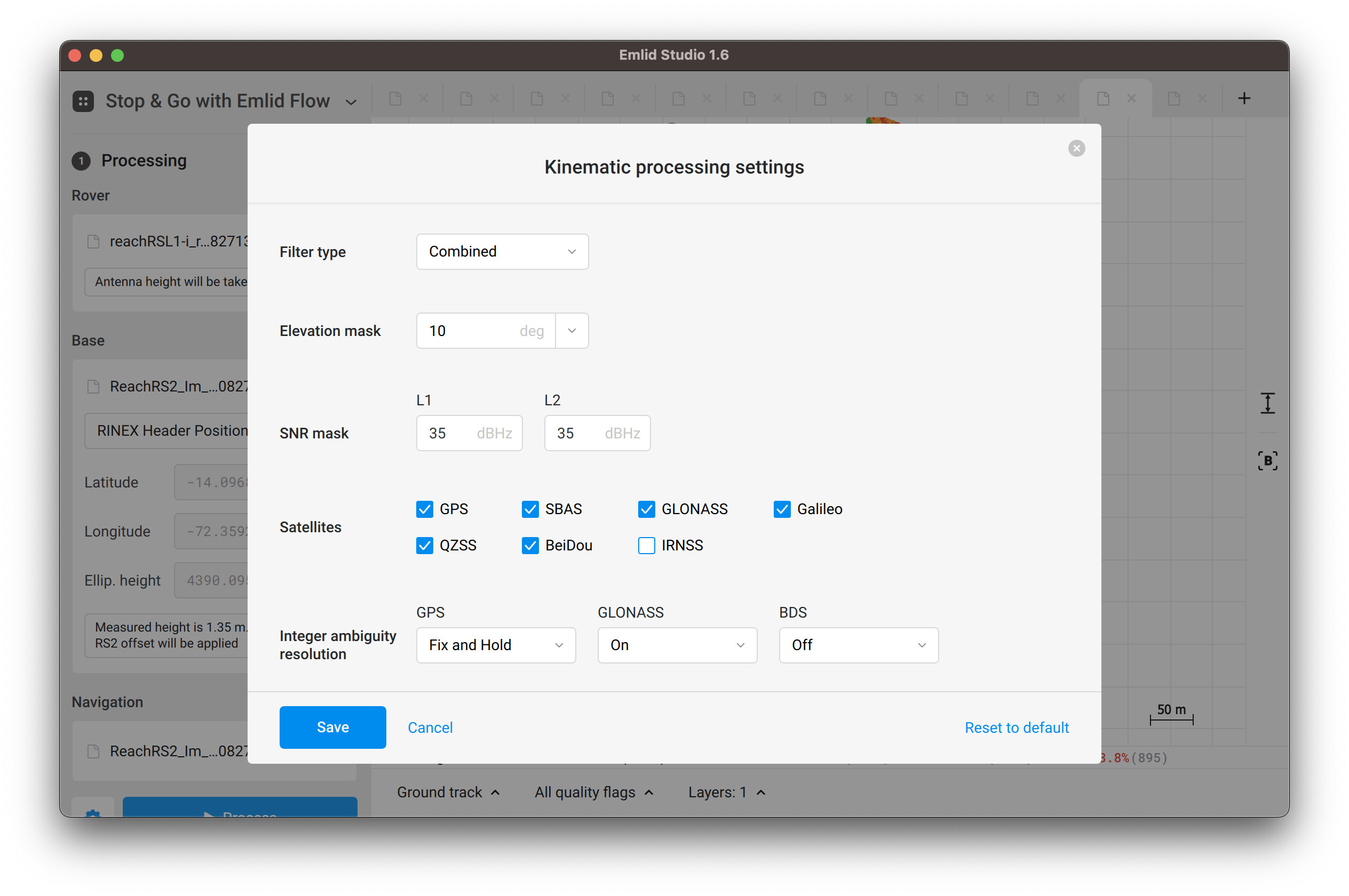
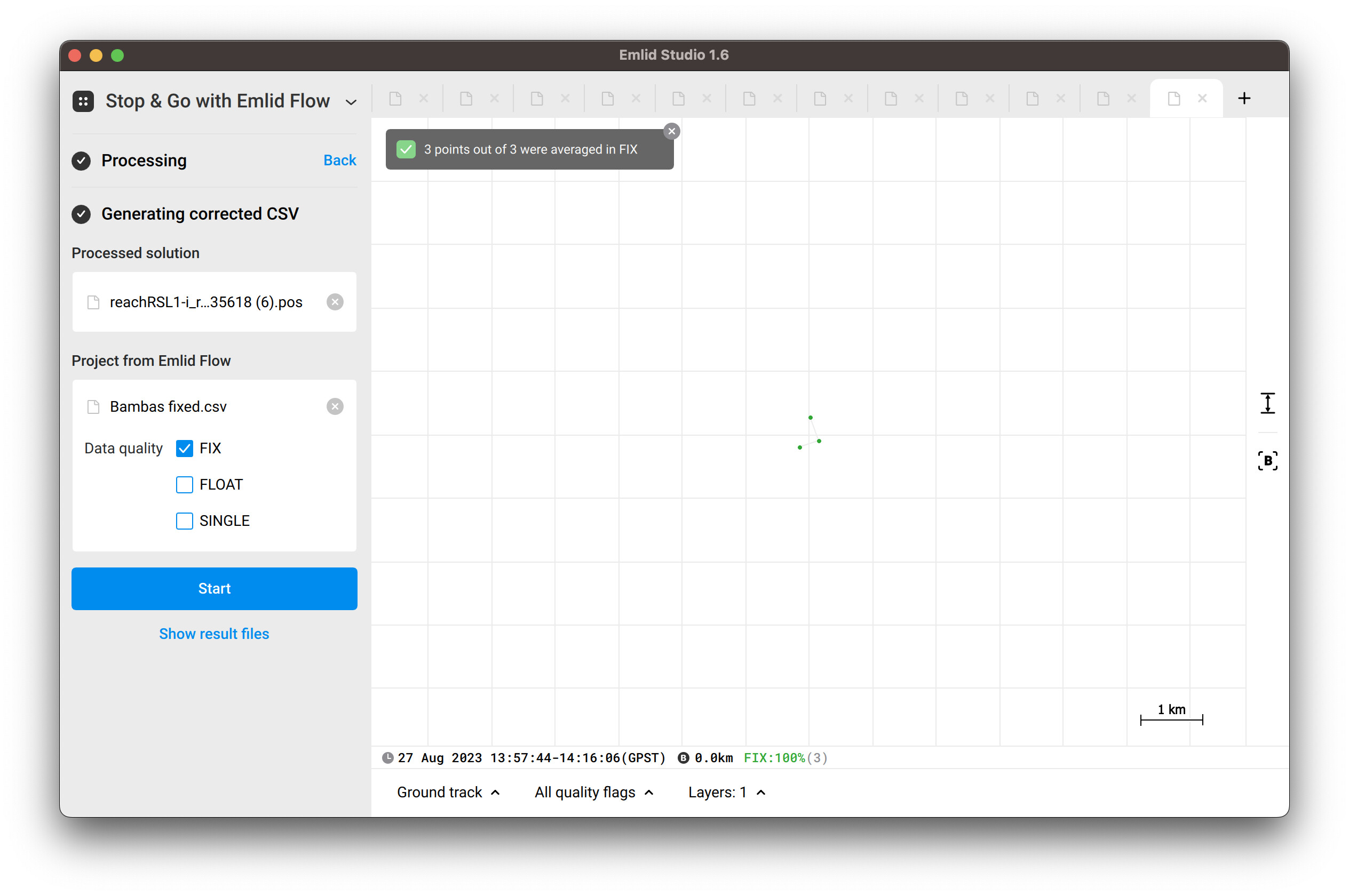
A small update: once I set the Integer ambiguity resolution for GLONASS satellites to ON, I received 35.3% of FIX solutions in the pos file and all three points were improved to the FIX.
All constellations will give you a higher chance of receiving the FIX solution. You can leave the Update rate as is, I suppose it’s the 5 Hz for both base and rover.